Practices for Collecting, Managing, and Using Light Detection and Ranging Data (2025)
Chapter: 4 Applications
CHAPTER 4
Applications
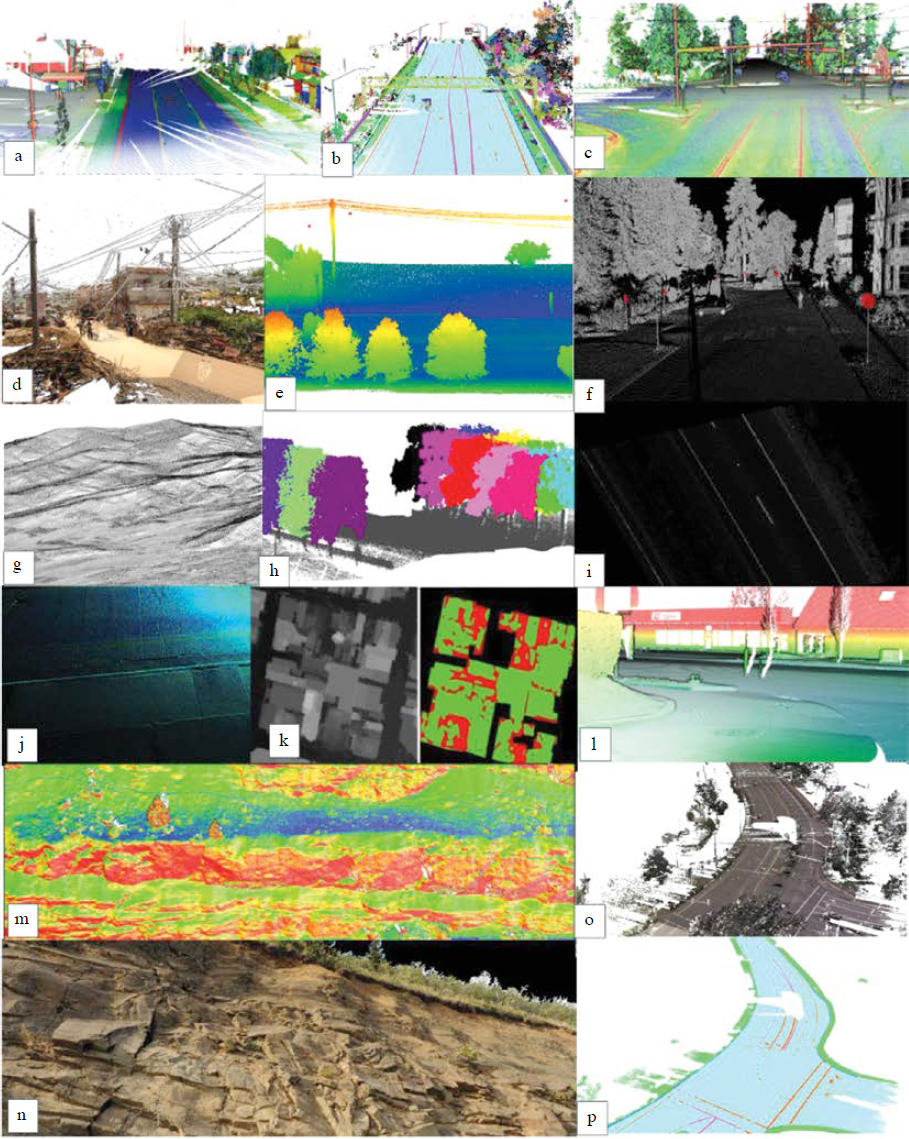
As Lidar technology continues to evolve, new applications of Lidar have revolutionized many aspects of infrastructure projects as well as enhanced operational efficiencies (Vincent and Ecker 2010, Yen et al. 2011). Lidar technology has been extensively utilized in a variety of transportation applications (Figure 3) globally by researchers and state DOTs (Chang et al. 2012; Olsen et al. 2013). Its diverse applications underscore its role in enhancing and transforming transportation systems. Herein, applications are categorized into the following primary groups: roadway projects; operations, maintenance, and safety; slope stability; mapping; and emergency response. Each category captures distinct ways in which Lidar technology contributes to improving the design, safety, and management of transportation infrastructure. In the subsequent sections, each category is explored in detail, providing insights into how Lidar data are leveraged to drive advancements and solve complex challenges across many applications in the transportation sector. This chapter is meant to provide representative examples and is by no means exhaustive.
Roadway Projects
Although Lidar data can be employed in numerous types of roadway projects, this section focuses on four main categories: design, environmental analysis, construction quality control, and as-built map generation. Each category represents an important phase in the life cycle of roadway development, from initial planning to final documentation.
Design
The evolution of Lidar technology in the design of roadways has seen significant contributions from a range of studies, demonstrating its versatility and accuracy across varied geographic conditions and design stages. Starting from the early 2000s, Veneziano et al. (2002) highlighted Lidar’s capability to expedite the highway design process by providing preliminary terrain data under diverse environmental conditions, thus offering an efficient alternative to traditional field surveying and photogrammetric mapping.
Recent studies have continued to push the boundaries of Lidar in road design. For example, Antah et al. (2021) explored the integration of airborne Lidar in civil engineering, particularly for inaccessible terrains in Malaysia, enhancing the design and documentation processes by providing detailed 3D data to support planning and execution. Similarly, Momeni Rad et al. (2024) integrated BIM with Lidar data, showcasing significant improvements in design compliance and safety through generative design techniques applied in real-world highway projects in Alberta. These studies collectively underscore the growing reliance on Lidar technology in the road design sector, affirming its value in improving accuracy, reducing costs, and enhancing the efficiency of design processes.
Roadway Geometry
Gargoum and El-Basyouny (2019) provide a synthesis of Lidar applications in transportation focused on geometric assessments of highways. They describe techniques to extract information from point clouds and note a substantial disparity across different object types in the maturity of feature extraction algorithms.
Holgado-Barco et al. (2014) introduced an automated approach to extract geometric parameters from Lidar point clouds, which enabled improved characterization of road profiles to support the verification of construction standards and safety studies. Esfandabadi (2018) highlighted the significant advantages of using Lidar technology for enhancing highway safety through improved pavement cross-slope measurements. Traditional methods of collecting cross-slope data, which often rely on small and potentially unrepresentative samples, are limited in scope and accuracy. The research evaluated both airborne laser scanning (ALS) and MLS systems, confirming their effectiveness in capturing precise cross-slope data for highway safety assessments. Following this, Heath (2023) explores the use of Lidar within the United States Road Assessment Program, which assesses road safety and provides recommendations for infrastructure improvements. The study focuses on verifying road data elements with Lidar to enhance the accuracy of assessing roadway grades, curvatures, and roadside severities. The research indicates that Lidar is effective for measuring grade and cross slope, although estimating curvature accurately requires high-resolution data, pointing to areas for further research in road safety evaluations.
Shams et al. (2023) investigated the effectiveness of airborne and mobile terrestrial Lidar systems in measuring highway pavement cross slopes to enhance surface drainage and reduce hydroplaning risks. Traditional field surveying methods, though common, are labor-intensive, expose personnel to traffic, and provide only limited, sample-based data. This study conducted a technical evaluation at five test sections, extracting cross-slope data from Lidar point clouds using two methods: the end-to-end method, which uses elevations from pavement edge lines, and a 0.2 ft interval point extraction method with a fitted linear regression line. The Lidar-extracted cross slopes were compared with those measured by conventional surveying techniques. The results demonstrated that Lidar methods reliably collect accurate pavement cross slopes, suggesting their potential for statewide implementation to proactively address drainage issues. Lastly, Alzraiee et al. (2024) examine the cross slope of pavement surfaces important to road safety, particularly regarding hydroplaning risks. This research compared traditional surveying methods with a Lidar-based approach using a terrestrial laser scanner to evaluate cross slopes on rural road segments in San Luis Obispo County, California. The findings affirmed the precision of Lidar measurements, aligning closely with traditional survey data and confirming Lidar’s reliability for safety evaluations in road construction.
Hydrological Analysis
The value of Lidar support for the environmental sustainability of road infrastructure has been demonstrated through several studies over the years in applications such as hydraulic analysis, landslide mapping, coastal erosion assessment, and rockfall risk assessment. These studies affirm the expanding scope of Lidar technology in environmental analysis for roadway projects, emphasizing its capability to provide detailed, accurate terrain data that supports the sustainable development and management of transportation infrastructure.
High-resolution Lidar data has become pivotal in enhancing hydrological assessments. Hallmark (2003) investigated the use of Lidar data for hydraulic analysis along the Iowa 1 corridor, comparing it with traditional USGS data. The study found that while Lidar provided detailed terrain and drainage patterns useful for highway hydrology, the benefits varied depending on the terrain’s complexity. The study highlighted the potential of Lidar to enhance hydrologic
assessments in road design, particularly in areas with subtle terrain variations that significantly impact drainage.
Petroselli (2012) highlighted the advantages of Lidar-derived DEMs for hydrological studies, advocating for their adoption in water resource management because of their ability to accurately characterize basin behavior. Amatya et al. (2013) emphasized the need for higher-resolution data to perform reliable hydrological assessments. In 2016, Lopez and Maxwell introduced practical algorithms that utilize Lidar data for urban hydrologic modeling, illustrating how high-resolution data can improve overland flow simulations (Lopez and Maxwell 2016). This was followed by Wu and Lane in 2017, who proposed a method using Lidar to delineate wetland catchments and model hydrologic connectivity, providing insights for wetland management (Wu and Lane 2017). Choné et al. (2021) demonstrated how high-resolution Lidar data could enhance large-scale flood modeling accuracy without the need for costly bathymetry, showcasing Lidar’s utility in flood risk assessment. Subsequent studies in 2023 by Jiang et al. introduced innovative algorithms that preserve surface depressions in DEMs, optimizing hydrologic simulations and balancing computational efficiency with detailed feature preservation (Jiang et al. 2023). The scope of Lidar application in hydrological studies expanded further in 2023 with Panakkal et al., who developed an open-source framework that integrates real-time rainfall data and physics-based flood modeling to assist emergency responses during flooding (Panakkal et al. 2023). Markus et al. in the same year explored the use of Lidar for defining rating curves in stream discharge measurements in remote locations, promoting its use in remote stream flow monitoring (Markus et al. 2023). García-López et al. (2023) used drone-based Lidar to acquire piezometric data remotely with minimal manual intervention. Furthermore, Arghavanian and Leloğlu (2024) and Du et al. (2024) utilized Lidar data for mapping irrigation and drainage networks and automating ditch network extractions with deep learning models, respectively.
Rister et al. (2018) illustrated how mobile Lidar was instrumental in identifying problematic pavement grades that contribute to water ponding. This study underscored the potential of Lidar to improve QC processes in transportation projects, demonstrating its utility in addressing maintenance issues through detailed surface runoff modeling.
Construction and Inspection
Maier et al. (2018) emphasize the role of automation technologies, including 3D design and machine control, in optimizing construction phases. The study compiles various success stories that illustrate the ROI and outlines potential challenges in surveying and data management, providing a comprehensive guide for transportation departments.
Construction QC of roadway projects has significantly benefited from the integration of Lidar technology, enhancing the precision and effectiveness of construction quality assessments. For example, the use of Lidar to provide detailed and accurate roadway geometry, as described earlier in this chapter, also has important applications in construction QC. Herbert and Pacheco (2015) describe the improvements in detail provided by aerial-based Lidar in engineering planning and design, particularly for final design phases of construction projects. They discuss the suitability of Lidar datasets for a range of engineering practices, such as hydrology, channel hydraulics, and earthwork computations. It emphasizes that while Lidar data must be properly verified, it can significantly contribute to the accuracy of engineering works, offering guidelines on the appropriate use of Lidar data quality levels for various construction activities.
Nevertheless, challenges remain. Le et al. (2024) investigates the integration of modern sensing and monitoring technologies in highway construction projects, revealing that 28 state DOTs are implementing these technologies but face challenges such as the training of personnel and the maintenance of equipment operating in harsh environments.
As-builts
Recent advancements in Lidar, digital twins, and other 3D modeling technologies have significantly influenced as-built projects in roadway construction, promising enhanced precision and efficiency across various phases of infrastructure development. Notably, most Lidar systems provide co-acquired digital imagery to support as-built or as-is generation and modeling. Digital twins, which are virtual replicas of physical assets, enable real-time monitoring and simulation, enhancing the accuracy and effectiveness of infrastructure projects. While Lidar provides the fundamental geometry to support the development of digital twins, these digital twins can be enhanced by adding other sources of information and attributes. Some attributes (e.g., height of a sign) can be derived from Lidar while others require linkages to other data sources. Reeder and Nelson (2015) describe the transition from traditional 2D planning to 3D-engineered modeling, highlighting its applications in highway construction and noting the adoption by entities such as the Iowa DOT. This shift not only improves surveying and design but also offers practical insights into overcoming challenges during implementation. Expanding on the integration of technology in road construction, Lamas Novoa (2022) discusses the use of MLS systems in conjunction with BIMs to produce models of roadway infrastructures compliant with the Industry Foundation Class (IFC). This integration showcases the potential of MLS in improving the accuracy and compliance of infrastructure models, particularly over challenging terrains like mountain roads. Sturgill Jr. (2023) focuses on the integration of new standards in utility data management within roadway projects, advocating for the adoption of recent standards such as ASCE/CI/UESI 75-221 to enhance the accuracy and reliability of the as-built maps during road design and construction.
Finally, Ma et al. (2023) introduced an innovative approach to optimize the deployment of roadside monitoring Lidars (RMLs) for as-built intersections. Utilizing a novel virtual method, their research demonstrates how virtual simulations can guide the strategic placement and orientation of RMLs, thus facilitating improved decision-making in roadside technology deployment. These studies show the transformative impact of Lidar and related technologies in enhancing the level of detail in as-built mapping for roadway projects.
Roadway Network Assessment
White et al. (2010) demonstrated the utility of Lidar in forest management and road inventory by mapping road networks beneath dense forest canopies with high accuracy, emphasizing Lidar’s potential in environmental and watershed assessment activities. Concurrently, Azizi et al. (2014) advanced the application of Lidar in forest road extraction using a novel classification method that combined interpolation and ML techniques to enhance the accuracy of road inventory data. Similarly, Buján et al. (2021) introduced HyClass, a hierarchical hybrid classification tool designed to map both paved and unpaved forest roads utilizing Lidar data.
Operations, Maintenance, and Safety
Several studies demonstrate the multifaceted utility of Lidar across different aspects of road management, emphasizing its role in enhancing operational efficiency, effective maintenance, and safety. These studies are categorized into five groups: bridge inspection, slope stability, hydrological studies, road safety analysis, and highway performance management system, which are described in the following subsections.
Bridge Inspection
A challenge in classifying ALS point clouds arises from the absence of location data for certain bridges and, especially, culverts, which are hard to identify through visual inspection of ALS
point clouds (Fareed and Wang 2021). Nevertheless, the use of other Lidar platforms for bridge inspection is gaining traction as an effective method to overcome the limitations of traditional inspection techniques. This evolving application is well-documented in several recent studies that explore different methodologies and the integration of new technologies. For example, Bolourian et al. (2017) discussed the aging infrastructure in Canada, emphasizing the need for automated data collection systems. The study highlighted the use of UASs equipped with 3D Lidar scanners for inspecting surface defects on concrete bridges, offering flexibility and safety during the inspection of large bridge surfaces. Moreu et al. (2020) proposed a methodology for measuring construction progress by comparing it with designed 3D shapes, aimed at developing DOT standards for bridge construction. Their findings support the use of Lidar in QA and QC processes, significantly impacting the development of construction documentation.
Turkan and Calvi (2023) investigated the use of convolutional neural networks combined with Lidar data for automated crack detection on concrete surfaces, illustrating the potential of ML to enhance defect identification in bridge maintenance. Spadavecchia et al. (2023) presented a semi-automatic method using Lidar data for detecting deteriorations on structural elements, demonstrating the effectiveness of integrating ML classifiers with Lidar data for detailed condition assessments. Nasimi et al. (2023) highlighted the innovative use of UAS equipped with low-cost sensors for non-contact displacement measurements during bridge inspections, offering a glimpse into future technologies that could revolutionize structural monitoring and maintenance. Abdel-Maksoud (2024) explored innovative methodologies integrating UASs with traditional topographic techniques and Lidar sensors. This research demonstrated that while UAS-Lidar point clouds offer less accuracy under certain conditions, they provide a flexible and cost-effective solution for medium-accuracy bridge mappings.
Molina et al. (2024) assessed the use of UAS for bridge inspections, comparing a commercial photogrammetry system with a customized Lidar system. Their study validated the effectiveness of UAS in capturing accurate bridge measurements, emphasizing the consistency and comparability of Lidar data against traditional methods. Fukuoka et al. (2024) proposed the use of super-resolution technology to enhance Lidar data for bridge inspections in Japan, showcasing how technological advancements can reduce labor while increasing the precision of inspections. These studies demonstrate a significant shift toward integrating advanced technologies such as Lidar with UASs and ML to enhance the safety, efficiency, and effectiveness of bridge inspections. This body of research not only highlights the practical applications of Lidar in current infrastructure challenges but also sets the stage for its expanded use in future engineering practices.
Road Safety Analysis
The progression of road safety analysis through Lidar technology has marked a significant evolution in transportation engineering. The extraction of precise and detailed roadway geometry (as described earlier in this chapter) has supported a wide range of road safety analyses. Lidar can provide roadway geometric information that can support federal reporting requirements such as the MIRE, which are important to safety studies. For example, data from the Fatality Analysis Reporting System (FARS) can be integrated with detailed topographic or visibility information from Lidar data to provide insights into road safety issues.
The impact of Lidar on road safety studies was notably demonstrated in a collaborative study by Seat (2020) with the Utah Department of Transportation and Brigham Young University, which highlighted the role of Lidar in reducing crashes through supporting improved access management and median installations. In a similar vein, Oregon DOT found substantial savings by utilizing Lidar data to ensure that markings and signage provided adequate passing distances when a statewide speed limit increase was implemented.
Khattak and Shamayleh (2005) pioneered the visualization of Lidar data in GIS environments to enhance the assessment of highway stopping and passing sight distances. This early application set the foundation for subsequent studies focused on integrating Lidar data for road safety evaluations. Furthering the utility of Lidar, Tsai et al. (2011) utilized the technology to identify obstructions and quantify their severity, providing valuable tools for state DOTs to prioritize safety improvements. Simultaneously, Castro et al. (2011) developed procedures for determining visible distances along highways, enhancing safety assessments by integrating sight distance analyses. The methodology was expanded by González-Gómez et al. (2019) to highlight the importance of accurate modeling in ensuring road safety.
Jung et al. (2018) developed a voxelization approach to develop visibility diagrams for intersection sight distance. This analysis showed that the visibility diagrams provided by Lidar could identify visibility obstructions at a higher level of detail compared with conventional sight triangles. It also reduced the need for personnel to obtain measurements or layout objects in the roadway. Gargoum and El-Basyouny (2018) examined the role of sight distance in highway safety and proposed an innovative method for its assessment using Lidar technology. Traditional methods for measuring sight distance are time-intensive, often involving field visits or graphic analysis of as-built drawings. Gargoum’s study introduces a process for automatically assessing sight distance directly from Lidar data, significantly reducing the time and effort required for evaluations. By creating digital surface models and employing an algorithm to calculate sight distance from Lidar point clouds, the research successfully validated the method on Alberta highways, identifying areas where the minimum sight distance standards were not met, and correlating these with collision records to highlight potential safety improvements. Ma et al. (2022) developed an agent-based approach to identify conflicts with visibility at intersections using Lidar point cloud and trajectory information.
Lidar has also been important in tunnel management. Puente et al. (2016) automated the extraction of vertical clearances to enhance operational efficiency and safety in potentially challenging environments such as tunnels.
Gouda et al. (2021) and Wang et al. (2023) have furthered the capabilities of Lidar in road safety analysis. Gouda et al. (2021) developed a fully automated method using mobile Lidar to map and assess roadside clearance parameters, streamlining safety performance assessments. Meanwhile, Wang et al. (2023) introduced a novel methodology that utilizes Lidar to model 3D geometric road information, aiding in determining suitable driving speeds and enhancing intelligent transportation systems. These studies affirm the transformative impact of Lidar technology in advancing road safety assessments.
Pavement
Lidar can provide detailed geometric, radiometric, and other important element information to support the Highway Performance Monitoring System (HPMS). Yen et al. (2010) delve into the potential of mobile terrestrial laser scanning (MTLS) within Caltrans surveying applications, focusing on the creation of digital terrain models (DTMs) for pavement surfaces. The study presents methodologies for evaluating MTLS data accuracy, repeatability, and usability for pavement surveys. Lidar systems available at that time faced challenges in meeting Caltrans’ vertical accuracy specifications. Although there are discrepancies between mobile scan data and control points, with disciplined application, MTLS point clouds could potentially achieve the required accuracy levels. Key findings underscore the significance of short GNSS baselines, post-processing techniques for enhanced accuracy, and the necessity of ground controls for QA/QC purposes. Furthermore, the research establishes effective protocols for surveying workflows using laser scanners, offering valuable insights for real-world Caltrans applications. These insights led to
the development of the Caltrans Mobile Lidar Specification, which was adopted and/or adapted by many DOTs.
Lidar technology has been utilized in many applications for pavement condition assessments and maintenance. Chin and Olsen (2015) found that Lidar could provide detailed information on pavement smoothness evaluations. McIntosh (2020) explored the capabilities of Lidar in road maintenance through a comparative study that included traditional survey methods. The findings highlighted Lidar’s precision and cost-effectiveness, advocating for its broader adoption in standard road maintenance operations, particularly for tasks requiring high accuracy and minimal traffic disruption.
Ravi et al. (2021) discussed the importance of regular pavement monitoring for highways and airport runways to ensure the safe operation of vehicles and aircraft. Highways typically face issues like cracking and potholes, while airports are particularly concerned with foreign object debris (FOD) that could damage aircraft. The study proposes a novel algorithm for pavement surface inspection using mobile Lidar. The analysis of 8 miles of highway data collected at 55–60 mph demonstrated the algorithm’s efficiency in detecting pavement anomalies as small as 2 cm. Further validation at 15 mph with airport debris indicated that 100% of FOD items larger than 2 cm were successfully detected. The results suggest that mobile mapping systems Lidar is highly effective for pavement inspection and can detect even smaller FOD as sensor fidelity improves.
Pavement Marking Maintenance
Lidar technology is employed for multiple purposes related to roadway markings including both location of markings and retroreflectivity evaluations.
Marking Location and Delineation
Lidar systems are utilized to accurately identify and map the location of road markings. This application helps in creating detailed maps that include lane markings, crosswalks, and other road features. By pinpointing the exact location of these markings, DOTs can maintain accurate records for roadway management and planning.
In conjunction with a study evaluating the radiometric calibration of mobile Lidar systems for retroreflectivity analysis (Olsen et al. 2018; Che et al. 2019), Jung et al. (2019) developed an efficient approach to extract worn pavement markings from mobile Lidar data through a rasterization and image processing approach. These algorithms were implemented into the Road Marking Extraction (RoME) software tool. The use of this tool on a single project to estimate paint quantities for restriping resulted in cost savings higher than the initial research cost (Oregon DOT Research 2024). Olsen and Jung (2020) developed ML techniques to extract and classify different types of pavement markings. Later, Jung et al. (2024) developed robust techniques to improve the clustering process during the extraction, particularly in areas of curvature. Finally, this work was expanded for Oregon DOT in Olsen et al. (in press) to identify bike lanes, crosswalks, and medians in mobile Lidar datasets to support pedestrian facility GIS databases.
Rastiveis et al. (2020) present a novel method to locate pavement lane markings (LMs) within MLS point clouds. Given the tedious nature of manual feature extraction, this method leverages fuzzy inference for efficient identification. The process starts by segmenting the MLS point cloud into smaller tiles along the route and filtering out non-ground points. Using a Hough Transform algorithm, candidate LM areas are detected, and points within these areas are classified into “probable-LM” and “non-LM” clusters. Geometric and radiometric descriptors of the “probable-LM” clusters are analyzed through a fuzzy inference system to identify true-LM clusters. The final step involves enhancing and repositioning the extracted points to their original coordinates.
Zeybek (2021) introduced a semi-automated method for extracting road features from 3D point clouds using MLS. The study focused on the precise locating of road lane markings by employing advanced algorithms such as the alpha shape and parametric random sample consensus, combined with edge detection techniques. This methodology not only provided reliable spatial information but also highlighted the cost-effectiveness and efficiency of using Lidar over traditional methods, presenting a robust solution for road maintenance and traffic management.
Measurement of Retroreflectivity
In addition to locating markings for inventories, Lidar technology can also be used to measure and evaluate the retroreflectivity of road markings. Typically, in retroreflectivity applications, locating the markings is an initial step of the process. Retroreflectivity is an attribute that determines how well markings are visible at night or in low-light conditions. By measuring the retroreflectivity, DOTs can assess the condition of road markings and determine when they need to be replaced or enhanced to ensure optimal visibility and safety for drivers. Pavement markings are important features for autonomous vehicles to track their position within the lane; hence, the ability to detect and repaint worn markings is becoming increasingly important.
Olsen et al. (2018) explored the capability of mobile Lidar data in evaluating the retroreflectivity of pavement markings. The project, undertaken by Oregon DOT, utilized mobile Lidar to survey its highway network, aiming to enhance asset management and maintenance strategies. Findings from this study revealed that Lidar is effective in generating quantitative assessments of pavement marking retroreflectivity, offering a safer and more economical alternative to conventional field measurement techniques with handheld reflectometers. However, challenges such as sensor intensity saturation effects were noted, which restricted the accurate measurement of sign retroreflectivity, indicating areas for future technological improvements.
Ai (2022) performed a radiometric calibration of a different mobile Lidar system from another manufacturer capable of scanning pavement markings with higher retroreflectivity values. Ai performed detailed evaluations of different material types as well as the ability to monitor pavement degradation.
He et al. (2023) focused on the retroreflectivity of road traffic markings using vehicle-mounted Lidar. The research demonstrated how Lidar technology could enhance the efficiency and accuracy of maintenance operations through advanced data analysis techniques. Park et al. (2023) proposed metrics for Michigan DOT to quantify the detectability of markings by evaluating Lidar intensity patterns such as the range of intensity values and the proportion of higher intensity returns within a window. These metrics were developed from an analysis of degradation patterns observed in 3 years of mobile Lidar data from 210 drives on US-23.
While several of the aforementioned studies have found success using mobile Lidar for retroreflectivity evaluation, the correlations developed are only valid for a specific system. Some mobile Lidar systems do not provide sufficient or consistent enough data to be utilized for this assessment. For example, some researchers (Carlson et al. 2017) have found that intensity values in Lidar sensors that utilize multiple simultaneous lasers tend to vary substantially and result in poor correlation for radiometric calibration.
Slope Stability
Across diverse geographies and geological contexts, maintaining slope stability poses a perpetual concern, prompting a concerted exploration of innovative methodologies and technological advancements. In the United Kingdom, the Highways Agency has embarked on a proactive asset management strategy, leveraging airborne remote sensing technologies to enhance
road safety and reliability (Duffell et al. 2006). Through the adept utilization of Lidar survey data, the agency strategically prioritizes ground-based inspections of earthworks, efficiently detecting changes in slope profiles that serve as early indicators of potential instability. This integration of Lidar not only facilitates qualitative assessments but also enables quantitative analyses, thereby enriching asset inventories and empowering geotechnical engineers in their proactive maintenance endeavors.
With its unparalleled precision and resolution, laser scanning facilitates comprehensive analysis of slope morphology, enabling engineers to decipher the underlying mechanisms of instability and devise targeted mitigation strategies. In parallel, the versatility of 3D terrestrial laser scanning (TLS) is showcased across diverse disciplines, ranging from commercial surveying to geological and geotechnical applications (Hu et al. 2010). By seamlessly integrating TLS with advanced analytical platforms, researchers have unlocked a wealth of insights into slope stability, from volumetric assessments to detailed discontinuity characterization, heralding a new era of informed decision-making in slope management practices. These endeavors epitomize a concerted push toward a universal understanding of slope stability dynamics, underpinned by a symbiotic fusion of cutting-edge technologies, rigorous field studies, and interdisciplinary collaborations. As transportation infrastructure grapples with the evolving challenges of anthropogenic interventions, the insights gleaned from these endeavors stand poised to chart a course toward resilient and sustainable slope management practices, ensuring the longevity and safety of transportation networks (Olsen et al. 2021).
In regions experiencing shifts in precipitation patterns, such as Mississippi, the efficacy of nature-based solutions such as Vetiver grass in mitigating soil moisture and slope movement is being scrutinized (Rahman et al. 2024). Through meticulous field instrumentation and Lidar monitoring, researchers have observed tangible reductions in soil moisture content and minimal slope movement post-Vetiver plantation, heralding a cost-effective and sustainable approach to bolstering slope stability amidst evolving environmental challenges. However, technological innovation extends beyond mere monitoring to encompass predictive modeling and analysis. Recent strides in remote sensing, particularly interferometric synthetic aperture radar (InSAR) and Lidar, offer unprecedented opportunities for high-precision profiling of slopes for 3D stability analysis (Waugh and Shakoor 2015; Wang et al. 2017). By integrating Lidar scanning with the finite element method, researchers have unlocked new avenues for simulating slope behavior under varying precipitation scenarios, illuminating potential failure zones and advocating for proactive engineering interventions. Furthermore, the human impact on slope stability cannot be understated. In Kerala’s Western Ghats, for example, the proliferation of terraced rubber cultivation has triggered profound alterations to slope dynamics, heightening landslide susceptibility (Ajith et al. 2024). Through a meticulous synthesis of Lidar-derived DEMs and physically based modeling, researchers have delineated the intricate interplay between anthropogenic interventions and slope stability, underscoring the imperative of finer-resolution DEMs for accurate assessments.
Landslide Mapping
Many studies [e.g., Burns and Madin (2009), Chen et al. (2014), Leshchinsky et al. (2015), Alberti et al. (2020), and Senogles et al. (2022; 2023)] have demonstrated the utility of Lidar in detecting, mapping, and monitoring landslides even in the densely vegetated and shadowed terrains. These innovative uses of Lidar-derived DTMs and additional features (e.g., slope gradients and curvature) significantly improve the accuracy and completeness of landslide mapping and monitoring, which can improve safety and mobility through important lifeline corridors in rugged terrain. In work for Ohio DOT, Mora et al. (2018) utilized airborne Lidar datasets and support vector machine algorithms to detect landslide-prone areas and create probabilistic maps.
Rockfall
Lato et al. (2012) advocate for the use of mobile terrestrial Lidar technology in assessing rockfall activity, which traditional visual investigations fail to assess safely and accurately. By providing high-resolution digital models of rock masses and extracting geological and geometric variables, Lidar enables comprehensive and efficient rockfall analysis over extensive areas, highlighting its utility in improving roadside safety assessments. Dunham et al. (2017) and Markus et al. (2023) developed a rockfall activity index from high-resolution Lidar scans of rock slopes in Alaska to evaluate risk to motorists along a highway corridor as well as categorize slope faces into distinct morphological units based on slope gradient and roughness. Olsen et al. (2021) extracted patterns from Lidar data collected after the Canterbury earthquake sequence in New Zealand and extrapolated those to evaluate seismic rockfall activity in Oregon.
Coastal Erosion
During these advancements, the role of ground-based 3D laser scanning technology emerges as pivotal, particularly in dynamically changing environments like coastal areas prone to erosion and landslides (Collins and Sitar 2004). Numerous studies have explored the use of Lidar and GIS analysis to monitor coastal erosion patterns, assess shoreline change, and identify vulnerable infrastructure [e.g., Ahmad et al. (2021), Olsen et al. (2022), Senogles et al. (2022), Wang et al. (2023), Senogles et al. (2023), and Olsen et al. (2024)]. Ahmad et al. (2021) underlined the adaptability of Lidar in monitoring and managing environmental risks associated with road projects near coastal areas, emphasizing its role in shaping effective coastal management policies.
Mapping
Mapping plays a key role in transportation planning and management, aiding in infrastructure assessment, safety analysis, and intelligent transportation systems development. This literature review encompasses various studies exploring the application of Lidar technology and other remote sensing methods in transportation mapping. Soilán et al. (2020) introduce a semi-automated framework for modeling road lanes and alignment using point cloud data from mobile mapping systems. Their Cloud-to-IFC (Industry Foundation Class) workflow provides a method for standardized information exchange in infrastructure projects, aiming to enhance alignment description and asset modeling. Notably, while the IFC has shown promising results in vertical (building) construction, challenges have arisen in its application to horizontal (roadway) construction. Martin et al. (2020) highlight Lidar’s versatility in transportation applications, emphasizing its efficiency in data collection for infrastructure management and safety assessments. The study showcases its use in roadside clearance evaluations, intersection obstruction identification, and sight distance analysis, demonstrating its transformative potential in transportation projects.
Zhou et al. (2021) present a framework for highway alignment extraction and 3D modeling using ALS data. Their method achieves high correctness and completeness rates in alignment extraction and significantly reduces errors near road boundaries, offering a robust approach for intelligent transportation applications and highway design. Lei et al. (2021) tackle the challenge of detecting unstructured roads in forest environments, proposing a method combining image processing and 2D Lidar detection. Their system demonstrates feasibility and effectiveness in real-time processing, enhancing automation and intelligence in forestry engineering operations. Gouda et al. (2021) propose a voxel-based raycasting approach for automating roadside mapping and assessment using mobile Lidar data. Their method achieves high accuracy in edge detection and obstacle identification, supporting transportation authorities in decision-making for road maintenance and upgrades, with potential applications in autonomous vehicle design.
Shamayleh and Khattak (2003) delve into Lidar’s application for roadway inventory collection, showcasing its advantages over traditional field data collection methods. Their experimentation with Lidar data for Iowa’s Highway 1 illustrates its effectiveness in extracting roadway inventory elements, although acknowledging the need for further applications to justify its costliness.
Asset Management
The integration of advanced sensing and digital technologies has fundamentally transformed asset management across transportation sectors, heralding a significant shift toward more integrated and technologically driven methodologies. These advances are especially prominent in the utilization of Lidar technology, as demonstrated in various impactful studies. Guan et al. (2016) provide a detailed review of the use of mobile Lidar for road inventory applications.
In one of the earliest studies, Uddin (2001) showcases how airborne laser, aerial photography, and GPS technologies are employed to manage transportation infrastructure cost-effectively. His research highlights the effectiveness of Lidar in airborne laser terrain mapping, capable of scanning vast areas with high precision, which when paired with GIS software, significantly outperforms traditional ground-based data collection methods in terms of speed, accuracy, and cost-efficiency.
Further exploring Lidar’s capabilities, Ussyshkin et al. (2011) examined its application within the power utility sector, emphasizing its role in collecting high-density and accurate geo-referenced spatial data necessary for managing power line assets. The precision of Lidar facilitates detailed engineering analyses, such as catenary modeling and vegetation encroachment analysis, supporting the maintenance and operation of power lines. Similarly, Ellsworth (2013) discussed a pioneering initiative by the Utah Department of Transportation, which leverages mobile Lidar technology to enhance asset management capabilities dramatically. This project involved a comprehensive approach to systematically collect and process data across extensive road networks, illustrating a sophisticated strategy to make detailed asset information widely accessible and improve decision-making processes and public transparency.
Adding to the discourse, Davis and Donath (2014) addressed the complexities and costs associated with gathering detailed roadway infrastructure data, advocating for the adoption of mobile data collection systems equipped with technologies such as Lidar scanners and differential GPS receivers. This setup, mounted on vehicles that regularly traverse roads, enables efficient collection of multi-purpose data at a significantly reduced cost. Meanwhile, He (2017) and Gargoum and El-Basyouny (2018) emphasized the high level of effectiveness and efficiency of airborne and mobile Lidar technologies in capturing up-to-date information on highway assets, such as traffic signs, signals, and guardrails, and their role in automating the extraction of roadway features traditionally collected through labor-intensive site visits.
The integration of AI and other digital tools in asset management is further exemplified in the works of Kuang and Chen (2024), Gomes et al. (2023), and Shuangchen (2023). These researchers discuss the use of AI and point cloud technologies to enhance daily maintenance practices and manage highway assets in real time. Kuang, for instance, highlights the limitations of traditional, labor-intensive asset assessment methods and proposes the use of advanced AI techniques, such as computer vision and deep learning, for automatic object identification.
Che et al. (2023) examined mobile Lidar technology’s potential to support asset management in transportation. A three-step automated workflow is developed to extract and localize features such as curbs and curb ramps from dense 3D point clouds collected by mobile Lidar, achieving a recall, precision, and F-1 score of 72.4%. Ai and Tsai (2016) evaluated the capabilities of mobile
Lidar data to assess ADA compliance for sidewalks and curb ramps. Zhou et al. (2024) developed a technique to simulate a digital inclinometer with the point cloud data for robust assessment. Che et al. (2024) performed detailed comparisons of terrestrial laser scans of curb ramps to digital inclinometer measurements and found that the TLS was capable of more systematic, consistent, and repeatable slope measurements, in addition to providing detailed measurements across the entire ramp.
Sanaei (2024) critiques traditional manual inspection methods for runways, advocating for the adoption of photogrammetry and laser scanning technologies to enhance airport asset management practices. These studies collectively showcase the potential of advanced technologies in transforming transportation asset management, emphasizing the need for automated workflows, advanced sensing techniques, and digitized infrastructure data to enhance efficiency and safety. The transition toward utilizing emerging technologies such as Lidar and AI in asset management not only enhances operational efficiencies but also promises more accurate, reliable, and economical practices. This evolution reflects a broader trend toward digitalization in asset management, necessitating continuous research and adaptation to fully leverage these technologies.
Reporting Requirements
Such analyses are imperative for adhering to stringent standards and reporting requirements outlined in frameworks such as NCHRP Web-Only Document 341: Roadside Database Coding Manual (Riexinger 2021), which incorporate elements from several datasets including the MIRE, the Model Minimum Uniform Crash Criteria (MMUCC), the FARS, the HPMS, and the Building Management System (BMS). These standards demand precise and comprehensive data to ensure accurate reporting and analysis, making the quality and reliability of the sourced Lidar data of paramount importance. By focusing on these capable sources, this section highlights the role that high-accuracy Lidar data plays in facilitating effective planning, compliance, and management across multiple facets of infrastructure and safety.
Substantial effort is required to extract these elements of information from Lidar datasets. Some DOTs are exploring methodologies to streamline the attribution process with Lidar data to simplify these reporting procedures. For example, Oregon DOT has several projects underway to advance the extraction of information from Lidar data. One project (SPR-866) is developing a feature extraction framework for road geometric characteristic extraction to support these reporting elements. Another project (SPR-850) is concluding soon and developed approaches to extract curbs, bike lanes, crosswalks, and other pedestrian facilities from Lidar data. Oregon DOT has another project starting soon building upon their prior research in the retroreflectivity of pavement markings to facilitate MIRE database development and reporting.
Autonomous Vehicles/HD Maps
Lidar data has become pivotal to the development of HD Maps. Lidar sensors are also an important component of many autonomous vehicles. For autonomous systems without Lidar sensors installed, Lidar sensors are still used to calibrate photogrammetric sensors. Wu (2025) underscores the importance of high-precision road maps for autonomous vehicle operations, proposing a framework for digitizing traffic control infrastructures to improve AV safety and road asset management, highlighting the benefits and challenges in their adoption.
Correia et al. (2017) underscores the evolving role of connected and autonomous vehicles in reshaping road management strategies to enhance mobility, safety, and environmental sustainability, while Liu et al. (2023) uses laser point cloud technology to enhance the precision in modeling individual road components toward the development of HD Maps.
Further exploring the capabilities of Lidar, Wang et al. (2022) investigated its application in autonomous vehicle navigation on horizontal curved roads. The study employs virtual simulations based on Lidar data to examine how curve radius and vehicle speed impact the vehicles’ ability to safely navigate, suggesting modifications to speed limits considering autonomous vehicles.
Emergency Response
Traffic Incidents
Emergency response in transportation has evolved significantly with the integration of Lidar technology and other advanced methods to enhance public safety and traffic flow management. Ransberger (2009) explored the application of geospatial technologies in emergency management, particularly focusing on the detection of transportation network obstructions using Lidar data. In the aftermath of Hurricane Katrina in New Orleans, Louisiana, Lidar-based change detection algorithms proved effective in identifying blockages caused by debris and damage. These findings were integrated into an experimental emergency response GIS, demonstrating how Lidar-detected blockages could improve response times for emergency routes, thus underscoring the potential of Lidar to enhance emergency response efficiency.
Moving forward, Mathew et al. (2024) introduced innovative techniques to enhance traffic incident management (TIM) by refining camera positioning along Interstate routes. Their study developed a novel mapping method that linked over 350 traffic cameras to around 5,000 locations along Indiana’s Interstate routes, significantly reducing incident verification time. In this study, Lidar data were utilized to extract 3D control points for the camera calibration process. They also developed new performance metrics for camera coverage and image quality and proposed a web application to optimize camera views, indicating a shift toward more integrated and efficient traffic management systems.
Post-Earthquake Blockage Detection
Seydi and Rastiveis (2019) present a deep learning-based method to assess the status of urban street networks after an earthquake using Lidar point clouds. The framework consists of three main phases: extracting deep features from Lidar data using a convolutional neural network, using these features in a multilayer perceptron neural network to detect debris areas within the road network, and applying the amount of debris to a damage index to classify road segments as blocked or unblocked. The method was evaluated using Lidar data from Port-au-Prince, Haiti, after the 2010 earthquake. The framework achieved over 97% accuracy in debris detection and correctly labeled 31 out of 37 road segments as blocked or unblocked.
Crash Reconstruction
Crash reconstruction plays a pivotal role in enhancing transportation safety and understanding the dynamics of accidents. Lidar can significantly reduce the time required to document an accident scene resulting in less impact on traffic and negative effects on the economy. This section synthesizes recent advancements in utilizing sensor data, Lidar scanning technology, historical 3D point clouds, mathematical modeling, and crash test data analysis for effective crash reconstruction and forensic investigation. Lyu et al. (2017) introduce a mathematical model for estimating vehicle collision angles in road traffic accidents, validated through multi-angle collision experiments using 3D laser scanning. While showing promise, the model’s limitations include its applicability to single-object collisions with relatively simple deformation surfaces, suggesting avenues for future research to enhance its utility.
Desai et al. (2021) proposed a methodology for forensic crash investigation using Lidar scanning technology in consumer handheld devices, demonstrating good agreement with survey-grade TLS for profiling damaged vehicles. Handheld scanning offers significant time savings and access to unreachable vehicle areas, aiding in faster scene clearance and damage assessment. Beck et al. (2023) suggested a data pipeline for analyzing autonomous vehicle (AV) crashes, leveraging raw data from onboard sensors such as Lidar, radar, cameras, IMUs, and GPS. Their study demonstrates the transformative potential of sensor data analysis in crash investigations, showcasing insights into driver behavior, vehicle movement, and surrounding objects.
Kottner et al. (2023) present a methodology for accident reconstruction using historical 3D point clouds (Lidar), aerial imagery, and photogrammetry, offering significant benefits in terms of safety, budget, time, and historical preservation. Their approach shows high accuracy in determining evidence locations and comparative point cloud analysis. Sharma et al. (2024) propose integrating crash test data with multibody simulation techniques for crash reconstruction and occupant injury estimation. Their approach, tested on real-world crash cases, demonstrates promising results, enhancing confidence in crash analysis and safety assessment. These studies contribute to advancing emergency response capabilities in transportation through innovative methodologies and technologies, ultimately aiding in reducing the severity and frequency of accidents on our roadways.
Through such advancements, emergency responders and transportation authorities can leverage Lidar technology to streamline crash reconstruction processes toward improving overall roadway safety.














