Tactile Wayfinding in Transportation Settings for Travelers Who Are Blind or Visually Impaired: Volume 1: Conduct of Research (2025)
Chapter: 5 Experiment 2: Navigating TWSIs in a Controlled Environment
CHAPTER 5
Experiment 2: Navigating TWSIs in a Controlled Environment
There were two primary purposes of experiment 2:
- Determine whether 12-in.-wide (0.3 m) TDI paths can accurately and efficiently be followed when the paths go straight or turn at 45 and 90 degrees, and whether participants are able to recognize DWSs and stop when they encounter them while following a TDI path.
- Where TDI paths intersect, determine whether an indicator is needed to note the junction or choice point to improve the accuracy and efficiency of following a path that continues straight through or turns at the intersection.
These basic wayfinding functions were further varied by incorporating T and 4-leg junctions of TDI paths to test three different conditions for these junctions.
Setting
The second experiment was conducted in the lower level of the School of Government parking deck on the University of North Carolina at Chapel Hill campus (see Figure 7). This provided an area of approximately 50 × 150 ft (15 × 46 m) that was sheltered from the weather and roped off from vehicle traffic. The concrete decking provided a smoother, more level surface than was used for experiment 1, and there was adequate space to lay out a series of simple TWSI networks for testing (see Figure 8).
TWSIs Tested
Based on conclusions drawn from experiment 1, TDI-1 was used to construct 12-in.-wide (0.3 m) paths in experiment 2. Likewise, DWS-2 was selected from the previous experiment and installed at the end of each TDI path as a 2 × 3 ft (0.6 × 0.9 m) terminus. The DWS-2 was also tested as one of the 3 × 3 ft (0.9 × 0.9 m) surface conditions used for the choice point indicator (CPI; explained further in the next section) to denote a junction of TDI paths. Another CPI was an empty, smooth 3-ft-square (0.9 m) area of the parking deck with no raised elements. This blank space has been used in Sweden, Denmark, the Netherlands, and other European countries. The same surface-applied polymer panels from experiment 1 were used for the TWSIs in experiment 2.
Configuration Tested
Four different networks of TDI paths were arranged (Figure 8), with each path terminating in a DWS:
- Network 1 was a T-intersection with three 16- to 20-ft (4.9 to 6 m) TDI path legs. At the junction of the path legs, there was a 3-ft-square (0.9 m) area where no TDIs were installed. This area allowed for testing possible CPIs.

Figure 7. Photo of lower deck of parking garage showing general area used for experiment 2.
- Network 2 was a 4-leg intersection of TDI paths with the same 3-ft-square empty space where the paths intersected. This network also had a nonintersection 90-degree turn in the longest leg of the TDI path.
- Network 3 was another 4-leg intersection of TDI paths. However, there was no empty space at the path intersection; the two TDI paths simply joined perpendicular to one another. This network also included a nonintersection 45-degree turn in the longest leg of the TDI path.
- Network 4 was another T-intersection. However, there was no empty space at the path intersection; the two TDI paths simply joined perpendicular to one another.
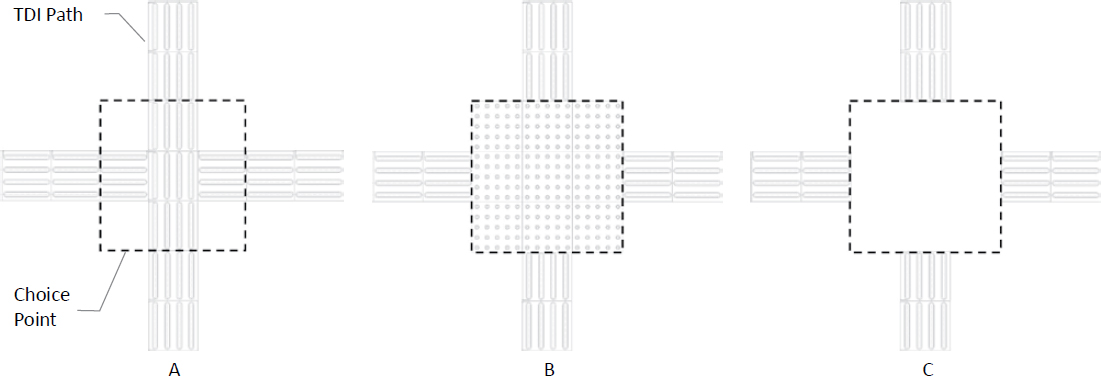
The point where two paths intersect is referred to as a choice point—travelers who arrive at such an intersection must choose which path to follow away from the intersection to continue toward their destination. The experiment was designed to evaluate the potential usefulness of having additional features at the intersection that call attention to its presence. These features are being referred to as choice point indicators (CPIs); in experiment 2, three CPI conditions were evaluated (see Figure 9).
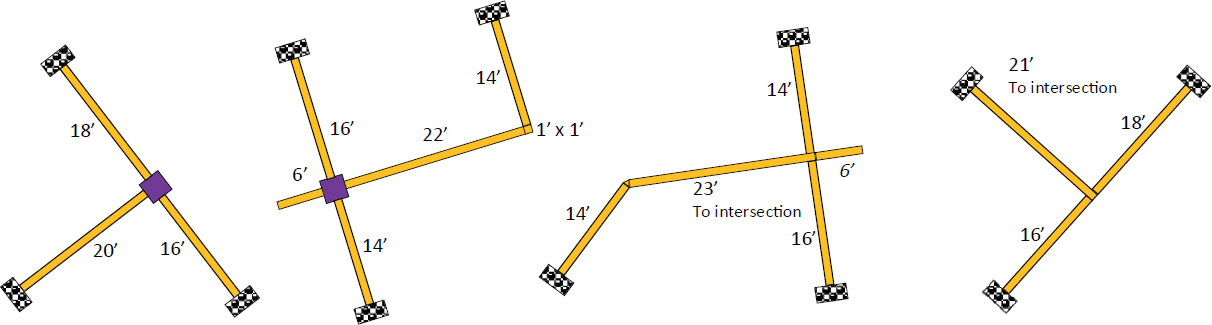
Figure 8. Diagram of the layout of a series of four simple TWSI networks used in experiment 2.
Procedure
Participants completed all experimental tasks individually. They were familiarized with the TDI and DWS surfaces to be tested. They did not use sound-occluding headsets in experiment 2. Participants were guided from one starting location to the next, sometimes positioned with the TDI path on their right and sometimes on their left. They were given instructions for each trial by the COMS, such as to follow the path to the DWS at the end (i.e., no intersection), or to follow the path to the intersection and to then continue straight or to turn left or right to continue to and stop at the DWS at the end of the path. Trials were blocked by CPI condition (none, DWS, or blank) with the order counterbalanced across participants. Order of tasks in each indicator condition was also counterbalanced across participants, meaning the starting locations varied from trial to trial so participants could not predict the distance they would walk before reaching a turn, intersection, or DWS terminus, nor whether a turn in the path or crossing leg of an intersection would be in front of them or to the left or right. A second researcher observed and recorded data.
Each participant was asked to complete 6 tasks in the no-indicator condition and 4 tasks in each of the other two CPI conditions for a total of 114 tasks. Participants completed each of these 14 tasks 4 times for a total of 56 trials each—1,120 trials in total.
When running the 4 trials of a particular task in a particular condition, task variants were included. For example, when participants were asked to follow a TDI that made a nonintersection 90-degree turn with no indicator present, individuals were positioned such that the path was either on their right or their left, meaning the path turned away from them in some trials and cut across their direction of travel in other trials. As another example, participants were asked to perform a turn at the T-intersection of two TDI paths on some trials and at a 4-leg intersection on other trials. In addition, a turn might involve turning away from the TDI path they had been following on some trials (e.g., following the path with the TDI on their left and then needing to turn right) and turning across a TDI path they had been following on other trials (e.g., following the path with the TDI on their left, and then needing to turn left).
There were limits to the number of trials conducted to ensure participants could complete their session within 2 hours and to reduce mental and physical fatigue to participants. As such, and given the number of conditions and tasks, it was not possible to create enough repetitions of all variants to allow for effective analysis at the level of the variations (e.g., how did participants do when they needed to turn away from the TDI at the intersection vs. turn across the TDI at the
intersection). Instead, these variants were included to obtain valid averaged data about overall performance when completing particular tasks (e.g., making a turn at an intersection of TDI paths) under a variety of conditions/variants a traveler might encounter.
Data Collected
Data collected by the research team through observation was used to understand how participants could follow TDI paths, navigate turns and intersections of paths, and begin to use TWSIs as a simple system. Tasks included asking participants to:
- Follow a TDI path with a 45-degree turn (no intersecting path)
- Follow a TDI path with a 90-degree turn (no intersecting path)
- Continue straight when encountering an intersecting TDI path in the path of travel—sometimes at a 4-way intersection from any approach, other times at a T-intersection when traveling along the top of the T on the side with the intersecting stem or leg
- Continue straight while traveling along the nonintersecting side of a T-intersection (e.g., along the top of the T)
- Perform a turn at the intersection of two TDI paths when encountering an intersecting TDI path in the path of travel—sometimes at a 4-way intersection from any approach, sometimes at a T-intersection when traveling along the top of the T on the side with the intersecting stem or leg, and other times when traveling up the leg/stem of the T and turning left or right
- Perform a turn while traveling along the top of a T-intersection on the side away from the intersecting leg/stem; in this condition, participants needed to detect the stem TDI intersecting on the far side of the TDI path being followed, then turn onto that TDI path
While participants performed the various tasks, a second researcher observed and recorded observable behavioral data throughout each trial (sample components of data collection form in Appendix C), including:
- Any observed difficulty following a path when it was continuing straight or when it turned
- Whether participants went the direction instructed (go straight, turn left, turn right) when first departing the intersection
- Whether participants independently found and announced the correct destination as marked by DWS—they might have found it with no errors, or they might have missed or made a wrong turn at the intersection but then realized it and independently turned around and successfully navigated to the intended destination
- Duration of the trial
- Any interventions performed by the COMS
Analysis and Results
As with the first experiment, 20 participants who self-reported being unable to ever see crosswalk lines, curbs, or poles, were recruited for the path-following trials. Participants ranged in age from 33 to 72 years with an average age of 56 years. Fifteen of the participants were male (75%). Six participants used a guide dog as their primary travel aid, though all were skilled at traveling with a long cane. All participants had been traveling independently for at least 2 years, with an average of 31 years of independent travel experience among them.
The percentage of trials where the participant was correct in their judgement and performed the given task (e.g., percentage of trials where a participant detected the correct TDI leg at an intersection marked by a blank space CPI and turned as instructed) was calculated. Each participant had 56 trials walking across the three intersection types (T, 4-leg, and nonintersection).
Where T or 4-leg intersections were encountered, the experiment also tested performance of the three different CPIs.
Like the analyses of experiment 1 data, the analyses of experiment 2 data involved conducting one- or two-way repeated-measures ANOVAs with Greenhouse-Geisser corrections where there were violations of sphericity, and Bonferroni corrections for multiple comparisons when considering paired comparisons between individual conditions/levels.
Correct Direction Rate on TDI Path Intersection Trials
A key measure of success was the frequency with which participants went the correct direction away from a path intersection after the first time they arrived at the intersection. Having been instructed on each trial to either go straight or to turn left or right once they reached the intersection, it was recorded whether they did go the correct direction after arriving at the intersection. At the highest level, this does not indicate whether they detected the intersection, and thus on some trials, participants may have been successful in going the correct direction despite not detecting the intersection.
Starting with both intersection types (4-way and T) and all trials regardless of the instruction provided (go straight or turn), a one-way repeated-measures ANOVA was conducted to evaluate the effect of CPIs on successful navigation through the path intersection. There was a significant effect [F(2,38) = 13.315, p < 0.001], and post hoc comparisons reveal that participants were significantly more successful with the DWSs and blank CPIs than with no CPI [t(19) = 4.207, p < 0.01, and t(19) = 3.816, p < 0.01, respectively]. The DWSs and blank CPIs resulted in equivalent performance [t(19) = 0.547, p > 0.05].
Interaction between Type of Direction and Type of CPI
As noted, the overall success rate likely includes as successes some instances where participants did not detect the intersection but were successful in going the correct direction because their task was to go straight. As such, a two-way repeated-measures ANOVA was conducted to evaluate the effect of CPIs and type of direction (straight vs. turn) on successful navigation through the path intersection. The interaction between CPI type and type of direction was significant [F(2,38) = 19.133, p < 0.001], and thus the analysis focuses on the simple main effects of CPI type for the two directions separately. When the instruction was to go straight, there was a significant effect of CPI type on likelihood to navigate through the intersection in the correct direction [F(1.4,27.1) = 5.444, p < 0.05]; however, that effect appears to be of little practical significance given that average success rates were at or above 95.0% in all three CPI conditions, as shown in Table 4. Alternatively, when the instruction was to turn at the path intersection, there was a significant effect of CPI type on likelihood to navigate through the intersection in the correct direction [F(2,38) = 17.699, p < 0.001], and very sizable differences in success rates were present. Post hoc comparisons reveal participants were significantly more successful with the DWSs and blank CPIs than with no CPI [t(19) = 4.433, p < 0.001, and t(19) = 4.799, p < 0.001, respectively]. The DWSs and blank CPIs resulted in equivalent performance [t(19) = 0.370, p > 0.05].
Table 4. Experiment 2 results: trials where the participant went the correct direction from the intersection (4-way and T).
| CPI condition | Overall average percentage* | Average percentage when instructed to go straight* | Average percentage when instructed to turn* |
|---|---|---|---|
| No CPI | 85.0% | 100% | 70.0% |
| DWS | 95.9% | 98.1% | 93.8% |
| Blank space | 95.0% | 95.0% | 95.0% |
* The omnibus analysis of this variable is statistically significant.
The significantly lower rate of success making turns at path intersections when no CPI is present (70.0%) reveals that the high rate of “success” when going straight at path intersections with no CPI involves many instances where the intersection was almost certainly not detected, and success was a matter of not needing to turn. When DWSs or a blank CPI were used, rates of successful navigation of the intersection were consistently high regardless of the instruction to go straight or turn (rates at and above 93.8%). The difference in mean rates for straight and turning routes with DWSs as the CPI is not statistically significant [t(19) = 1.324, p > 0.05].
Considerations at T-Intersections of Paths
T-intersections have the potential to offer a challenge not present at square 4-way intersections. At a 4-way intersection, if following beside a TDI path toward the path intersection, there will always be another TDI path that cuts across the path of travel. At a T-intersection, the same will be true when traveling up the leg/stem of the T toward the top, or when traveling along the top part of the T on the side of the TDI where the leg intersects. However, if traveling beside the TDI along the top of the T on the side away from the leg, there will not be another TDI path cutting across the path of travel. To investigate this special case, a two-way repeated-measures ANOVA was conducted to evaluate the effect of CPIs and initial travel position/direction at T-intersections on successful navigation through them. The interaction between CPI type and initial position/direction was significant [F(2,38) = 11.685, p < 0.001], and thus the analysis focuses on the simple main effects of CPI type for the two positions/directions separately.
When participants started from a position where a TDI path would cut across their path of travel as they reached the path intersection, there was no significant effect of CPI type on likelihood to navigate through the intersection in the correct direction [F(1.5,28.3) < 1.0]. However, when participants started the trial traveling along the outside/top of the T, there was a significant effect of CPI type on likelihood to navigate through the intersection in the correct direction [F(2,38) = 11.565, p < 0.001]. Post hoc comparisons reveal that participants were significantly more successful with the DWSs and blank CPIs than with no CPI [t(19) = 3.960, p < 0.001, and t(19) = 3.630, p < 0.01, respectively]. The DWSs and blank CPIs resulted in equivalent performance [t(19) = 0.384, p > 0.05]. The significantly lower rate of success navigating a path intersection according to instructions when no CPI is present and participants are traveling along the top/outside of a T-intersection (75.6%) reveals the challenge created by not having any features that specifically call attention to the presence of the path intersection, as shown in Table 5. When DWSs or a blank CPI were used, rates of successful navigation of the intersection were consistently high regardless of the starting and traveling position relative to the T-intersection (rates at and above 92.5%).
The analyses highlight that the most challenging situation occurs at a T-intersection when traveling beside the TDI at the top of a T on the side away from the leg and needing to turn onto the leg. Considering these specific conditions, a one-way repeated-measures ANOVA was conducted to evaluate the effect of CPIs on successful navigation through the path intersection, revealing a significant effect [F(2,38) = 14.861, p < 0.001]. Post hoc comparisons reveal that
Table 5. Trials where the participant went the correct direction at T-intersections.
| CPI condition | Average percentage when starting on the leg of the T or along the top of the T on the side closer to the leg | Average percentage when starting on the top of the T on the side away from the leg* | Average percentage when instructed to turn starting on the top of the T on the side away from the leg* |
|---|---|---|---|
| No CPI | 98.8% | 75.6% | 51.3% |
| DWS | 97.5% | 93.8% | 90.0% |
| Blank space | 98.8% | 92.5% | 92.5% |
* The omnibus analysis of this variable is statistically significant.
participants were significantly more successful with the DWSs and blank CPIs than with no CPI [t(19) = 4.076, p < 0.01, and t(19) = 4.524, p < 0.001, respectively]. When no CPI was present, participants were on average successful at navigating such turns in 51% of trials. The DWSs and blank CPIs resulted in equivalent performance [t(19) = 0.384, p > 0.05].
Correct Destination Rate on TDI Path Intersection Trials
Participants continued each trial until they announced they had arrived at the destination they were instructed to find, or indicated they could not find the destination and wished to end the trial. As such, it was possible for participants to reach the correct destination even if they initially went the wrong way at the intersection. Sometimes a participant would judge they had missed the intersection or otherwise gone the wrong way, and then independently turn around and eventually find the destination. Thus, when the rates of independently finding the correct destination are analyzed, many of the average success rates are slightly higher than those for initially going the correct direction; however, the overall pattern of findings is the same. In many instances, success in finding the destination was statistically significantly better when a CPI was present than not, and the DWS and blank CPI performed equivalently (see Table 6; the nature of these findings is the same as they were for going the correct direction).
Average Speed on TDI Path Intersection Trials
Based on correct direction and correct destination rates, it appears that having a CPI is beneficial, but there is no evidence from those variables to suggest one type works better than the other (blank vs. DWS). Even if both result in success in navigating and finding a destination, it remains possible that one can be more efficient. For each trial where the destination was found, an average travel speed was calculated as total distance of travel (using the most efficient route along the TDI path) divided by the amount of time the participant needed to reach the destination. Using a dependent t-test, there was no significant difference [t(19) = 0.787, p > 0.05] between the average speeds in the DWS [M = 0.59 ft/sec (0.18 m/sec)] and blank [M = 0.56 ft/sec (0.17 m/sec)] CPI conditions.
Nonintersection Turns
Participants were sometimes told to follow the path to the DWS at its end and were not told they would encounter an intersection or turn. On these trials, though participants were not told, the TDI path turned either 45 or 90 degrees after about 20 ft (6 m). Participants had been familiarized at the beginning of their session with the fact that a path might turn, but they were not reminded of this at any point once the experimental trials were underway. It was again recorded whether participants went the correct direction at the turn and whether they arrived at the correct destination and successfully detected it and announced being at the end. For these trials, failing
Table 6. Trials where the participant found the correct destination by intersection type.
| CPI condition | Overall average rate (4-way and T) | Average rate when instruction was to go straight (4-way and T) | Average rate when instruction was to turn (4-way and T)* | Average rate when starting at leg or along top of T on side close to leg (T) | Average rate when starting along top of T on side away from leg (T) | Average rate when instructed to turn starting along top of T on side away from leg (T)* |
|---|---|---|---|---|---|---|
| No CPI | 89.3% | 96.3% | 82.1% | 97.5% | 82.5% | 71.3% |
| DWS | 96.4% | 97.5% | 95.2% | 95.0% | 96.1% | 92.9% |
| Blank space | 95.2% | 93.8% | 96.7% | 97.5% | 93.0% | 95.0% |
* The omnibus analysis of this variable is statistically significant.
to go the correct direction occurred if participants lost the TDI path entirely at the turn and did not reestablish contact with the path within a few seconds, or if a participant believed they were at the end of the path while at the turn and announced being at the end without making the turn.
Participants were significantly more successful at making the turn reasonably smoothly when it was a 45-degree turn (participants went the correct direction on average on 85.0% of trials) than a 90-degree turn [(M = 75.0%); t(19) = 2.373, p < 0.05)]. The rates of success making such turns were lower than many of the rates of success in navigating turns at path intersections. Rates of successfully finding and identifying the end of the path marked by DWS were very similar to those for going the correct direction (85.0% for 45-degree turns and 78.8% for 90-degree turns, a difference that is not statistically significant; t(19) = 1.751, p > 0.05). Thus, when participants got confused or disoriented at the turn, they rarely recovered successfully to get back on route and continue to the destination.
Walking on Top of the Surface vs. Using a Cane
During the familiarization portion to prepare participants for the trials, they were encouraged to try some different ways of following the TDI path; they might walk beside the bars and trail/shoreline of the TDI using their cane, they might walk with one foot on the TDI, or they might walk entirely on top of the TDI. When performing the experimental trials, participants were told to use whatever technique seemed most comfortable and effective to them. Therefore, participants used a following technique of their choosing, and this variable was not assigned by the team. It is possible that the following strategy participants used might impact following performance, and thus data was recorded about the technique they used on each trial (specifically, regular foot contact or no/very limited foot contact). This data might inform best practices that could be taught by COMS for following TDIs. However, as the following technique was not an experimentally assigned or controlled variable, the data does not lend itself to inferential statistical analysis. Looking at descriptive statistics only, participants followed the TDI paths using regular foot contact in around 70% of trials, and walked beside the TDI (no routine foot contact) in 30% of trials. Many participants used one technique fairly exclusively, while some used different techniques on different trials. Table 7 shows success in going the correct direction when following on top of the TDI or beside the TDI for all intersection types and approaches.
For all three choice point conditions, the observed rates of going the correct direction at path intersections were greater by about 7 percentage points when following the TDI using regular foot contact than when following while walking beside the TDI. Again, these observed differences should be understood as exploratory as the nature of the data does not allow statistical analysis.
Experiment 2 Conclusion
By and large, participants had no difficulty following straight segments of TDI paths that were 12 in. (0.3 m) wide with a 4-bar pattern. When needing to follow paths and go a particular direction after encountering a path intersection, average rates of going the correct direction
Table 7. Percentage of trials where the participant went the correct direction at the intersection by following strategy.
| CPI condition | Regular foot contact with TDI (one or both feet) | Walking beside TDI |
|---|---|---|
| No CPI | 86% | 78% |
| DWS | 98% | 91% |
| Blank space | 97% | 90% |
after reaching the intersection were at and above 85% in all CPI conditions, and average rates of independently reaching and identifying the correct destination were at and above 89%. When investigating more deeply, it became apparent that certain intersection navigation tasks are more difficult than these numbers would indicate, but only when there is no CPI present. Average rates of success for specific wayfinding conditions were as low as 51% and were 70% and 76% in other conditions. However, when either CPI was present (DWS or blank), average rates of success in all conditions considered were at or above 90%. The evidence demonstrates there is significant value in having a CPI present at path intersections, and suggests the DWS and the blank-space CPI evaluated in this research were equally effective. Qualitative feedback from participants revealed a mix of preferences between the domes or the blank CPI.
Somewhat surprisingly, the average rates of success in navigating unannounced 45- and 90-degree turns in TDI paths were a bit lower than the success rates in navigating path intersections with a CPI. It is possible this is an artifact of the experimental design and instructions; based on the instructions for so many other trials, participants may have become accustomed to being told when they would need to make a turn, so unannounced nonintersection turns posed problems within the experimental context. Alternatively, there may be features of such turns that make them difficult to navigate.
Given the results of experiment 2, a CPI is recommended at TDI path intersections. The behavioral data shows the DWS and the blank-space CPI resulted in equivalent human performance, but considering other factors, the blank space may be preferable. In the United States, DWSs are currently limited to being used as a warning at hazards (e.g., at the bottom of curb ramps before entering the street, beside sidewalk-level bicycle lanes before entering the lane, along the edge of elevated transit platforms). If used as a CPI, the domes would not be providing a warning, they would instead be serving as a sort of attention field. Given equivalent excellent performance with the blank-space CPI, it is preferable to reserve the use of truncated domes for providing a warning. Additionally, blank-space CPIs are less expensive for agencies to use because of less total TWSI material to be purchased and installed (i.e., there is an empty space free of any TWSI) and less material to be maintained.








