Global Navigation Satellite Systems: Report of a Joint Workshop of the National Academy of Engineering and the Chinese Academy of Engineering (2012)
Chapter: Analysis of the GNSS Augmentation Technology Architecture--Chen Jinping
Analysis of the GNSS Augmentation Technology Architecture
CHEN JINPING
Beijing Global Information Center of Application and Exploitation
BACKGROUND
The development process of GNSS is divided into four stages: (1) experimental construction stage (GPS I), (2) infrastructure construction stage (GPS II), (2) augmentation construction stage (Wide Area Augmentation System [WAAS]/ Local Area Augmentation System [LAAS]), and (4) architecture construction stage (GPS III).
The architecture construction stage is to meet the requirements from different military and civilian users, consider multi-GNSS compatibility and interoperability, design the basic GNSS and augmentation system in whole, and emphasize the policy, law, standards, and industrialization of GNSS.
The current existing augmentation technologies were developed for legacy GPS, and the augmentation systems are independent of each other. There are no uniform definition and standard. The user is a little confused with the application of these augmentation systems.
In the architecture construction stage, the redefinition of GNSS augmentation technology architecture is needed. Future augmentation systems should be constructed for the improvement of basic GNSS performance.
INTRODUCTION TO THE CURRENT GNSS AUGMENTATION TECHNOLOGY
The current GNSS augmentation technologies are shown in Figure 1. The comparison of different GNSS augmentation technologies is shown in Tables 1 and 2.
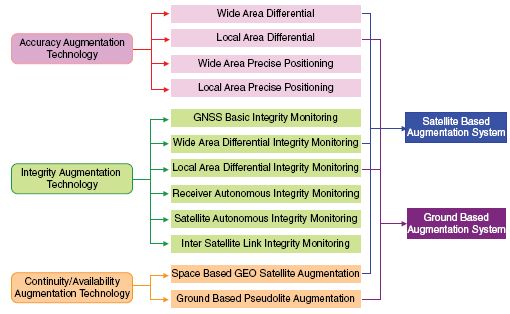
FIGURE 1 The current GNSS augmentation technologies.
ANALYSIS OF GNSS AUGMENTATION GOALS AND OBJECTS
The goal of GNSS augmentation is to meet the improved performance requirements of the high-level user. GNSS navigation performance requirements defined by the International Civil Aviation Organization (ICAO) and the Radio Technical Commission for Aeronautics (RTCA) are shown in Tables 3 and 4.
The above tables show that the accuracy, integrity, continuity, and availability requirements are different in different flight phases. The accuracy requirement can be met easily, but the integrity, continuity, and availability requirements are stringent and cannot be provided by the current GNSS.
In addition, some high-level users have required decimeter and centimeter positioning accuracy, and these requirements cannot be provided by the current GNSS either.
The objects of augmentation are to allow the basic GNSS, including GPSII, modernized GPS, GLONASS, Galileo, COMPASS regional system and GPSIII, modernized GLONASS, Galileo+, and COMPASS global system, to meet positioning, navigation, and timing service requirements.
The constellation, user range error (URE) performance, and integrity monitoring performance are different for different GNSS and for their different construction stages. So the accuracy, integrity, continuity, and availability performance are at different levels (Table 5).
The goals of augmentation show the accuracy requirements of augmentation can be divided into two classes: 1 m level and <1 m level (including decimeter
TABLE 1 Comparison of Current GNSS Differential Technologies
| Coverage and Station | Processing Principle | Broadcasting | Performance | Status | |
| Wide Area Differential Technology | Thousands of kilometers. Tens of stations | State differential method, generation of ephemeris, clock correction and ionospheric delay parameters and based on pseudorange measurements (assisted with carrier phase) | GEO/radio beacon, RTCA | Accuracy 3 m (single frequency), no initialization | WAAS EGNOS MSAS GAGAN |
| Wide Area Price Positioning Technology | Global, Nearly 100 stations | State differential method, generation of ephemeris, clock correction and mainly based on carrier phase measurements | GEO/lnternet, SOC or self-defined protocol | Accuracy dm level (dual frequency carrier phase), 20 minutes initialization | GDGPS StarFire Omni Star |
| Local Area Differential Technology | Tens of kilometers. Several stations | Measurement differential method, generation of integrated pseudorange correction parameters and mainly based on pseudorange measurements (assisted with carrier phase) | VHP, RTCA/RTCM protocol | Accuracy (single frequency), no initialization | LAAS NDGPS RBN-DGPS |
| Local Area Precise Positioning Technology | Tens of kilometers. Several stations, or extended to thousands of stations | Measurement differential method, mainly based on carrier phase measurements, Local area users can receive the local area error correction parameters processed with the VRS, FKP, MAC modes | GPRS/CDMA. RTCM protocol | Accuracy cm level (dual frequency carrier phase), 1~2 minutes initialization | CORS |
TABLE 2 Comparison of Current GNSS Integrity Monitoring Technologies
| Coverage and Station | Processing Principle | Broadcasting | Performance | Status | |
| GNSS Basic Integrity Technology | Global. Several to tens of stations | Generation of URA or SISA/SISMA with processing of ephemeris and clock error | Nav Message | GPS, Risk, IE-4/hr TTA, hrs to mins, Galileo, TTA, 6s Risk, 2E-7/l50s | GPS Galileo |
| WAAS Intigrity Technology | Thousands of kilometers. Tens of stations | Generation of UDRK, GIVE with processing of ephemeris, clock error and ionospheric grid parameters | GEO RTCA | TTA, 6s Risk, 2E-7/l50s | WAAS KGNOS MSAS GAG AN |
| LAAS Integrity Technology | Tens of kilometers. Several stations | Generation of integrity parameters with processing of differential pseudorange integrated correction parameters | VHP RTCA/ RTCM | TTA, 2s Risk, 2E-9/l5s | LAAS NDGPS RBN-DGPS |
| RAIM Technology | Visible satellites measurements | Detection and elimination of fault satellite measurements with multi measurements redundancy | - | Almost no TTA Pmd, 1E-3 | Receiver |
| SAIM Technology | Satellite feedback signal measurements | Generation of integrity parameters with monitoring of satellite signal power abnormality, pseudo code abnormality, clock error overrun and navigation data mistake | Nav Message | TTA, 2s Risk, IE-7/hr | Under research |
| ISL Integrity Technology | Inter satellite crosslink measurements | Generation of integrity parameters with monitoring satellite orbit and clock error abnormality | Nav Message | Unspecific | Under research |
TABLE 3 GNSS Navigation Performance Requirements Defined by ICAO
| Accuracy (95%) | Integrity | Continuity Risk | Availability | |||||
| Flight Phase | H | V | HAL | TTA | Risk | |||
| H | V | |||||||
| Ocean | 3.7 km | N/A | 7.4 km | N/A | 5 min | 1 × 10-7/h | 1 × 10-4~ 1 × 10-8/h | 0.99-0.99999 |
| Domestic | 3.7 km | N/A | 3.7 km | N/A | 5 min | 1 × 10-7/h | 1 × 10-4~ 1 × 10-8/h | 0.99-0.99999 |
| Terminal | 0.74 km | N/A | 1.85 km | N/A | 15 s | 1 × 10-7/h | 1 × 10-4~ 1 × 10-8/h | 0.99-0.99999 |
| NPA | 220 m | N/A | 556 m | N/A | 10 s | 1 × 10-7/h | 1 × 10-4~ 1 × 10-8/h | 0.99-0.99999 |
| APV I | 16 m | 20 m | 40 m | 50 m | 10 s | 2 × 10-7/P | 8 × 10-7/15 s | 0.99-0.99999 |
| APV II | 16 m | 8 m | 40 m | 20 m | 6 s | 2 × 10-7/P | 8 × 10-7/15 s | 0.99-0.99999 |
| Call | 16 m | 6~m | 40 m | 15~10 m | 6 s | 2 × 10-7/P | 8 × 10-7/15 s | 0.99-0.99999 |
TABLE 4 GNSS Navigation Performance Requirements Defined by RTCA
| Accuracy (95%) | Integrity | Continuity Risk | Availability | |||||
| Flight Phase | H | V | HAL | TTA | Risk | |||
| H | V | |||||||
| Cat I | 16 m | 4 m | 40 m | 10 m | 6 s | 2 × 10-7/150 s | 8 × 10-6/15 s | 0.99-0.99999 |
| Cat II | 5 m | 2.9 m | 17 m | 10 m | 2 s | 1 × 10-9/15 s | 4 × 10-6/15 s | 0.99-0.99999 |
| Cat IIIA | 5 m | 2.9 m | 17 m | 10 m | 2 s | 1 × 10-9/15 s | 4 × 10-6/15 s | 0.99-0.99999 |
| Cat IIIB | 5 m | 2.9 m | 17 m | 10 m | 2 s | 1 × 10-9/15 s(V) 1 × 10-9/15 s(H) | 2 × 10-6/15 s/15 s(V) 2 × 10-6/30 s(H) | 0.99-0.99999 |
TABLE 5 Analysis of Different GNSS Performance
| Constellation | Accuracy | Integrity | Notes | ||
| GPS | Legacy GPSII | 24 satellites | URE 8 m Position >10 m | Weak | |
| Modernized GPS II | 30 satellites | URE ~1 m Position <10 m | Improved, but unspeciftc | ||
| GPS III | 30 satellites | URE<1 m Position ~1 m | Cat I | ||
| GLONASS | Legacy GLONASS | 24 satellites | Comparative to Legacy GPSII | ||
| Modernized GLONASS | 24 satellites | Comparative to Modernized GPSII | |||
| Galileo | 30 satellites | URE<1 m Position 3~5 m | Global SOL service (Cat I) MHO broadcast I/Nav TTA: 6 s Risk: 2E-7/150 s | Galilco+ More improvement | |
| COMPASS | Regional System | 12 satellites | URE ~2 m Position ~10 m | Augmentation system is integrated in the basic GNSS TTA:6s Risk: 2E-7/approach (Cat I) | |
| Global System | 30 satellites | Comparative to Galileo and GPSIII | |||
and centimeter). The integrity requirements of augmentation can be divided into two classes: Cat I level (TTA 6 s, Risk 1E-7/approach) and better than Cat I level (TTA 2 s, Risk 1E-9/15 s). The continuity and availability requirements of augmentation are corresponding to the integrity requirements. Additionally, the 1 m level users are high in real time, and their integrity, continuity, and availability requirements are also high. The <1 m level users are slow in real time, and their integrity, continuity, and availability requirements are relatively low.
The objects of augmentation show: In earlier stages, for legacy GPS and GLONASS, the constellations consist of 24 satellites, the position accuracy is >10 m, and the integrity performance is weak. So the augmentation technologies and augmentation system is needed to improve the performance. In modernization stage, for modernized GPSII, Galileo, modernized GLONASS, etc., the constellations consist of 30 satellites, the position accuracy is <10 m and approaching to 1 m level step by step, the integrity performance has been improved and approaches CAT I, but the performance goals of these systems are unspecific. In architecture stage, for GPSIII, Galileo+ and COMPASS global system, the constellations consist of 30 satellites, these systems are interoperable, the position accuracy is 1 m level, and the integrity performance reaches CAT I performance. The augmentation systems should be redesigned carefully.
DEFINITION OF FUTURE GNSS AUGMENTATION TECHNOLOGY ARCHITECTURE
The current existing augmentation technologies are presented for the earlier GNSS. The future augmentation technology architecture can be defined with the following principles:
- The 1 m accuracy and Cat I integrity performance will be provided by the basic GNSS as the first layer in global coverage and by the wide area augmentation system, which is constructed by some country or organization as second layer in regional coverage.
- The <1 m accuracy performance will be provided by the local area precise positioning system constructed by each country or organization.
- Better than Cat I level integrity performance will be provided by the local area integrity augmentation system constructed by a specific user group.
- The continuity and availability performance will be assured by the fact that every constellation consists of 30 satellites and constellation interoperability.
The definition of future GNSS augmentation technology architecture is shown in Figure 2.
GNSS layer: 1 m accuracy performance is provided by the constellation and signal-in-space (SIS) user range of multi-GNSS. Cat I integrity performance

FIGURE 2 Definition of future GNSS augmentation technology architecture.
is provided by integrating the GNSS basic integrity monitoring and satellite autonomous integrity monitoring (SAIM) and inter-satellite link (ISL) integrity monitoring as the first layer in global coverage.
Wide area augmentation layer: Based on the basic GNSS, as the second layer in corresponding areas, the performance of 1 m accuracy and Cat I integrity are provided by wide area argumentation systems, which are constructed by various countries or organizations by integrating wide area difference, wide area precise positioning, and integrity monitoring technology.
Local area augmentation layer: Based on the basic GNSS, <1 m accuracy performance is provided by local area precise positioning systems, which are constructed by various countries or organizations with local area precise positioning technology. Better than Cat I integrity performance is provided by local area integrity argumentation systems, which are constructed by various user groups with local area integrity monitoring technology.
Receiver layer: Corresponding to the above three level services, there are four types of receiver for navigation, positioning, and integrity monitoring. At the same time, receiver autonomous integrity monitoring technology is used for related integrity analyzing.
CONCLUSIONS AND QUESTIONS
From the definition of the technology architecture, the GNSS basic system and the augmentation system are independent as well as coupled and reflect the multiplayer architecture. The development of GNSS basic system and augmentation system may refer to this architecture, so as to realize interoperability step by step in the aspects of design, technique realization, application standard, etc.
Of course, multi-GNSS basic system and augmentation system have already formed their definition and been constructed. To implement this architecture, the following questions should be answered:
- For the performance of 1 m accuracy and Cat I integrity, the following questions should be studied: How to define the corresponding performance standard, such as the constellation geometry and the SIS URE? How to integrate the technologies of system basic integrity monitoring and SAIM and ISL integrity monitoring?
- Based on the performance of GNSS basic systems, the following questions should be studied: How to classify definition for GNSS basic systems and the Wide Area Augmentation Systems constructed by different countries or organizations? How to construct independently under the same standard? How to integrate Wide Area Augmentation System and Wide Area Precise Positioning System?
- Today, many countries are developing local precision positioning systems and local integrity augmentation systems for the legacy GPS. The
following questions should be studied: How to adapt the development and change of GPS signal? How to design and construct for multi-GNSS?
- For different service mode and different user receiver, the following questions should be studied: How to define the standards of navigation and integrity application processing? How to define the relation between system integrity processing and receiver autonomous integrity monitoring?









