Data Fusion of Probe and Point Sensor Data: A Guide (2024)
Chapter: 1 Introduction
CHAPTER 1
Introduction
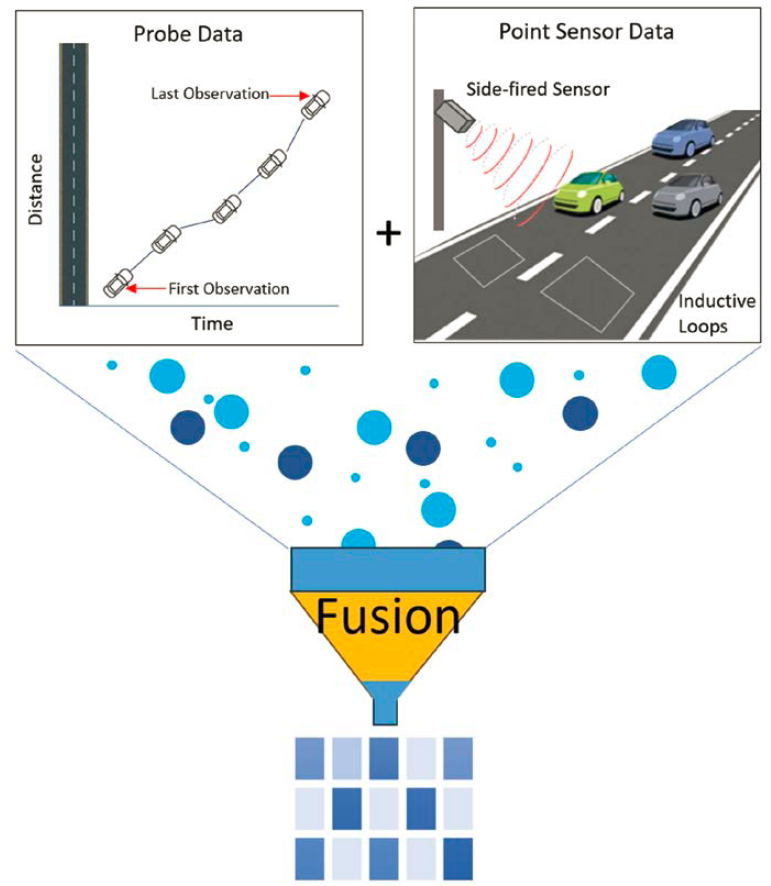
Agencies have invested in a diverse array of vehicle sensors and data products aimed at providing insights into real-time systems performance. For example, in the past agencies may have installed inductive loops, video detection systems, or side-fired microwave sensors at select locations to detect traffic speeds and volumes; the same agency may now also purchase probe-based vehicle speed data from the private sector. Sometimes these data overlap geographically to provide separate, complementary, or even competing information. There are many data fusion techniques available that could use these overlapping datasets to provide agencies with higher-quality data, new information, and/or better decision-making capabilities than could have been achieved with only one data source (Figure 1).
At its core, data fusion involves merging data from various sources in a way that enriches context and meaning, thereby enhancing the ability of the decision maker to make an informed assessment of a situation or initiate a course of action (Waltz and Llinas 1990) (Klein 2012). While the principles of data fusion are straightforward, the execution and application to transportation present challenges rooted in data ownership, inconsistent data formats, differing spatial referencing systems, ease of implementation, among other concerns. This is especially true for point-sensor data and probe-based data.
This document exists to guide agencies in adopting cost-effective data fusion techniques that will enable better knowledge of the network state, for the sake of improving traffic management and planning decisions that address recurrent and non-recurrent (e.g., incident-related) congestion, mobility, and safety.
The remainder of this report will explain the different probe and point-sensor data types available today, provide examples of potential data fusion use cases, and then provide a detailed framework for how to implement data fusion, and provide real-world examples of implementation. The next six chapters contain the following information:
Chapter 2: Data Examples: This chapter covers the differences between point-sensor data and probe data and provides examples of each.
Chapter 3: Data Fusion Use Case Examples and Descriptions: This chapter provides a list of potential use cases for point-sensor and probe-based data fusion along with six different write-ups of use cases that state and local departments of transportation (DOTs) have described as being high value during the surveys and interviews conducted for this research effort.
Chapter 4: Pre-Fusion Considerations: This chapter includes items that agencies and systems implementers should consider before and during the implementation of a point-sensor and probe data integration effort. Seven specific areas for consideration are covered, including:
- Evaluating the expected return on investment (ROI) so that agencies do not spend too much money on an overly complicated system that is too costly to maintain for the expected benefits.
- Understanding the impacts to legacy systems so that new efforts do not negatively impact current operations or encounter unexpected costs during and after implementation.
- Obtaining the rights to datasets, as some private-sector providers still limit allowed uses.
- Ensuring that derivative products are non-sensitive and privacy-preserving.
- Choosing private-sector datasets carefully, as there is volatility in the probe data marketplace.
- Ensuring the data have enough coverage and high enough quality to support the particular use case.
- Ensuring that use case-specific algorithms are not directly copied from others without modifying for local conditions.
Chapter 5: Data Fusion Framework: This chapter includes the point sensor and probe data fusion framework that was developed for this report. The data fusion framework described in Chapter 5 includes material for executives, operations personnel, and implementers. Each section of the framework will be clearly marked for the intended audience member. Sections can be read or skipped as necessary for the reader.
Chapter 6: Real-World Implementation Examples: In this chapter are two point-sensor and probe data fusion use cases that have been previously implemented. These use cases
demonstrate how to follow the data fusion framework as described in Chapter 5. They are very different in terms of their outputs and purpose, but both demonstrate the principles of the data fusion framework.
Chapter 7: Additional Fusion Resources: This chapter is separate from the list of references used to develop this report. It is a list of key resources that are directly applicable to implementing probe and point-sensor data fusion.


