UAS Flight Proficiency Examination: Proctor Guide for PROPS Test (2026)
Chapter: 3 Flight Proficiency Assessment Questions

CHAPTER 3
Flight Proficiency Assessment Questions
Part 1: Mission Planning
Instructions: In this part of the exam, the proctor asks the RPIC a series of questions concerning pre-mission activities. The RPIC is allowed to use relevant tools and resources that would typically be available during mission planning, such as websites and applications. However, the RPIC may not seek assistance from anyone. This portion of the exam can be completed away from the mission site. Depending on the situation and at the proctorʼs discretion, aborting a mission may be the most appropriate course of action.
1. Mission Planning Elements
Question: Assume you have been tasked with a UAS mission that is scheduled to be conducted in 7 days. Describe the process and major tasks associated with planning a UAS mission.
Minimum Performance/Knowledge: 3b
Evaluation Guidance: The RPIC should list the following items. Other items may be applicable based on the type of mission they are expected to perform and agency requirements.
- Mission objective(s);
- Hazards;
- Weather considerations;
- Interactions with terrain and structures;
- Payload details, risks and mitigations for risks;
- Takeoff and landing areas; and
- Emergency procedures.
Sample Response: “When planning a UAS mission, I always start by defining the mission objectives to ensure I have a clear understanding of the task at hand, whether itʼs for inspections, mapping, or any other operation. I then consider any hazards that may affect the mission, such as obstacles like trees, buildings, power lines, or people in the area. Itʼs critical to account for weather conditions—I always check wind speeds, precipitation, and visibility to ensure safe flying conditions. The terrain and structures in the area are also a major consideration, as changes in elevation and proximity to buildings can affect flight paths and safety. In addition, I evaluate the payload for the mission, ensuring itʼs secure and that any associated risks are mitigated.
“Takeoff and landing areas are also crucial. I ensure that the area is free from debris and stable enough to avoid issues with dust or loose material, which could affect visibility or damage the UAS during these critical phases. I pay special attention to whether the area is sloped or near traffic, as this can pose risks for both the UAS and surrounding people or vehicles. The proximity to roads requires extra caution to avoid interference with traffic or endangering people.
“Beyond the environmental and technical factors, crew coordination is key. I make sure my entire crew is briefed on the mission and knows their specific roles, including VOs [visual observers] and anyone else involved. I also ensure all of our equipment is ready to go by checking that everything is functioning properly, including verifying that the UASʼs firmware and software are up to date and that batteries are fully charged. I double-check that we have all the necessary approvals, including any required FAA waivers or authorizations, as well as clearance from my supervisors or agency if applicable. Lastly, I ensure we have solid emergency procedures in place, such as protocols for handling communication loss or technical failures, so that we are fully prepared for any contingencies.”
Applicable ASTM Sections: 6.3.6, 6.3.6.1, 6.3.6.2, 6.3.6.3, 6.3.6.4, 6.3.7.5
2. Common Hazards and Risks During Site Survey
Question: Identify common hazards and risks that should be evaluated during a site survey for a mission you will likely perform.
Minimum Performance/Knowledge: 3b
Evaluation Guidance: The proctor should evaluate the RPICʼs ability to identify and assess common hazards and risks that could affect the safety and success of a UAS mission during a site survey. Examples include obstacles, poor weather, wildlife, manned aircraft, sources of radio interference, magnetic interference, human factors (e.g., fatigue, intoxication), and bystanders.
Sample Response: “Before starting any UAS mission, I conduct a thorough site survey to identify potential hazards and risks that could affect the safety of the operation. I first look for physical obstacles such as power lines, trees, or buildings that could interfere with the flight path. I also check the weather forecast to ensure there are no high winds, rain, or other adverse conditions that could affect the droneʼs stability or visibility. Wildlife is another consideration, especially birds, which could pose a collision risk. Iʼm always mindful of the presence of manned aircraft, particularly if the site is near an airport or helipad, and I ensure compliance with airspace restrictions. Radio interference is also something I assess, as nearby cell towers or Wi-Fi signals could disrupt communication between the drone and the controller. Additionally, magnetic interference is a serious concern, especially when operating near electric substations or other high-power electrical infrastructure. These areas can cause compass issues during takeoff or landing, as the magnetic field can interfere with the UASʼs navigation system, potentially leading to flight instability or inaccurate heading data. To mitigate this, I ensure that the compass is calibrated before the flight and consider alternative takeoff and landing sites if necessary. I also evaluate human factors, such as fatigue, to ensure I am alert and fully capable of conducting the flight safely. Lastly, I identify any bystanders or people in the area and establish a perimeter to keep them at a safe distance from the droneʼs flight path.”
Applicable ASTM Sections: 6.3.5.1, 6.3.7, 6.3.7.3
3. UAS Airspace Classification and Restrictions
Question: Assume you have been tasked with flying a UAS for a highway inspection near [insert address or coordinates of a mission site in controlled airspace accessible by Low Altitude Authorization and Notification Capability (LAANC)].
- Indicate the airspace classification of the mission site to the proctor.
- Show the proctor any altitude restrictions for UAS operations in this airspace and how authorizations, if needed, are received.
- Indicate to the proctor if there are currently any UAS-related Notices to Airmen (NOTAMs) or temporary flight restrictions (TFRs) at the mission site.
Minimum Performance/Knowledge: 3, b and B
Evaluation Guidance: The proctor should evaluate whether the RPIC understands the distinction between controlled and uncontrolled airspace. The RPIC should accurately explain the altitude restrictions, the necessary authorizations from air traffic control (ATC) for operating within controlled airspace, and the conditions under which small UAS (sUAS) operations are allowed. The RPIC should also be able to determine if there are any UAS-specific NOTAMs or TFRs at the mission site. This question is commonly addressed by demonstrating how to check airspace and request LAANC authorization using an FAA service provider application.
Sample Response: “Since the mission is located 3 miles east of Greenville–Spartanburg International Airport (GSP), which is in Class C airspace, I know Iʼll be operating in controlled airspace. Class C airspace typically surrounds busy airports like GSP, so I would first confirm this by using an FAA-approved application such as Aloft.ai or B4UFLY. Because itʼs in controlled airspace, I would need to obtain authorization before flying the UAS. GSP is on the LAANC network, so this can be done through an app on my phone. Based on the location of the mission, the FAA facilities maps indicate that the mission can receive immediate authorization if it is flown under 200 feet. I can use this same app to verify if there are any NOTAMs or TFRs. Currently, there are not any shown.”
Applicable ASTM Sections: 6.2.7, 6.2.7.1, 6.2.7.2, 6.2.7.3, 6.2.8, 6.2.8.1, 6.2.8.2, 6.2.8.3, 6.3.7.7
4. Weather Impact Assessment and Safety Precautions
Question: Assume you are planning a UAS mission to inspect a highway construction site near [insert airport name, which the proctor has previously identified as having poor weather] with a [UAS used for exam]. The mission is expected to begin in a few hours.
- Indicate the current weather at this location.
- Explain to the proctor how the prevailing weather conditions, such as wind, visibility, cloud cover, and other factors, would impact your ability to carry out a UAS mission.
- Based on your assessment, what changes or precautions would you implement to ensure the missionʼs safety?
Minimum Performance/Knowledge: B
Evaluation Guidance: The proctor should assess whether the RPIC can effectively find and interpret current weather conditions from a reliable source [e.g., Meteorological Aerodrome Report (METAR) or terminal aerodrome forecast (TAF)] and understand how those conditions, particularly poor weather such as high winds, reduced visibility, and low cloud cover, would affect a UAS mission. The RPIC should discuss potential operational impacts, such as difficulty maintaining stability, reduced flight endurance, or safety risks due to poor visibility. The RPIC should also demonstrate an ability to make adjustments or recommendations, such as delaying the flight, altering flight altitudes, or ensuring additional safety margins are in place, to mitigate weather-related risks. The RPIC should know the state DOTʼs threshold prohibiting flights based on weather conditions and the [UAS used for exam].
Sample Response: “To determine the current weather at the construction site near the airport, I would consult reliable sources such as METARs, RWIS (Road Weather Information System), windy.com, or weather.gov. I would check for key weather elements like wind speed and direction, visibility, cloud cover, and precipitation. For example, if the METAR indicates high winds, particularly above the operational limits of the UAS, I would assess how that could impact the stability of the aircraft and its ability to hover or maneuver precisely over the construction site. Reduced visibility due to fog or rain would also be a major concern, as it would impair my line of sight or be reduced to below the minimum 3 SM required for Part 107 operations.
“Additionally, I would evaluate the cloud cover and flight ceiling to ensure compliance with FAA regulations regarding the minimum 500-foot distance from the underside of clouds. If the cloud ceiling is too low, I would need to adjust the missionʼs altitude or possibly delay the flight until conditions improve.
“With all that being said, based on my assessment of the weather, I would ultimately decide to delay the mission until conditions improve.”
Applicable ASTM Sections: 6.2.10, 6.2.10.3, 6.2.10.4, 6.2.10.5, 6.2.10.6, 6.2.10.7, 6.2.10.8, 6.2.10.9, 6.2.10.10, 6.2.10.11, 6.2.10.12
5. Radio Frequency Interference and Control Link Loss Mitigation
Question: Assume you are at a mission site preparing to inspect a bridge using a [UAS used for exam]. During your preflight checks, you notice potential interference in the radio frequency bands near the site.
- Explain to the proctor what behaviors or alerts on the controller indicate radio frequency interference.
- Describe how you would ensure proper radio control performance and what steps you would take to mitigate any potential issues related to transmitters, receivers, and signal strength.
- Explain how UAS behavior is affected if the control link is lost and what safety measures are in place to handle such situations.
Minimum Performance/Knowledge: B
Evaluation Guidance: The proctor should evaluate whether the RPIC demonstrates a thorough understanding of the radio control system. The RPIC should address the significance of signal strength and how these factors influence UAS behavior, particularly in high-interference environments. They should describe strategies for maintaining signal strength and avoiding propagation issues, as well as how the UAS responds during a loss-of-link scenario [e.g., fail-safe modes such as return to home (RTH)]. The proctor may also evaluate whether the RPIC indicates the benefits of changing frequency on the controller.
Sample Response: “During my preflight checks for the Acme AirBurg 1000, I would first assess the environment by reading the signal strength icon on the UAS controllerʼs display. If I detect interference or unexpectedly low signal strength, I will attempt to change the frequency or channel on both the controller and the UAS. In some cases, adjusting the position of the antennas or ensuring there is a clear line of sight between the transmitter and the UAS can help improve signal strength. Additionally, I would check the transmitter and receiver for proper functioning, making sure that both have updated firmware and that no physical damage is present.
“In the event of significant interference that these steps cannot mitigate, I would consider repositioning the ground station or adjusting the flight path to avoid problematic areas. I would also ensure that I am operating the UAS within the manufacturerʼs recommended range to avoid any propagation issues.
“If the control link is lost during the flight, the Acme AirBurg 1000 is programmed to initiate its fail-safe procedure, which typically includes an RTH function. This means the UAS will automatically ascend to a preset altitude and fly back to the takeoff location, landing safely. Before the flight, I would confirm that the RTH function is properly configured, including the altitude setting, to ensure it avoids obstacles like trees or the bridge itself.”
Applicable ASTM Sections: 6.2.3.6
6. Evaluating the Mental and Physiological Conditions of Crew
Question: Describe the steps you would use to evaluate the mental and physiological conditions of a UAS flight crew to determine whether they are ready to perform the mission safely.
Minimum Performance/Knowledge: 3b
Evaluation Guidance: Here are several methods that the RPIC can use to assess the operational risk associated with themselves and their crew:
- Preflight health checks;
- Signs of obvious impairment;
- Signs of obvious physical impairment, discomfort, or lack of performance;
- Awareness of chronic and acute work and life stress events;
- Awareness of training completed;
- Monitoring workload and crew scheduling;
- Awareness of recent medical issues; and
- Awareness of recent new or changes to existing medicines.
Sample Response: “The process I would use to evaluate the mental and physiological conditions of my UAS flight crew starts with a preflight health check. I would ask each crew member how they are feeling and assess any signs of obvious impairment, such as fatigue or stress, by observing their behavior and communication. I would also look for any physical signs of discomfort or injury that could affect their ability to perform. In addition, I would be aware of any chronic or acute stressors, both work related and personal, that might impact their focus and decision-making during the flight. I ensure the crew has completed all necessary training and is scheduled in a way that avoids overload or fatigue. I would also ask about any recent medical issues or changes in medications that might affect their performance.”
Applicable ASTM Sections: 6.3.7.1
7. GNSS/GPS Signal Issues and Mitigation Strategies
Question: Assume you have been tasked with flying a UAS mapping mission in an open field during a clear day when you notice fluctuations in your UASʼs altitude and telemetry data on the controller.
- What could be the cause of the fluctuations in altitude and telemetry data?
- Describe how GNSS/GPS technology helps provide position and altitude data.
- Explain how solar weather or terrestrial interference might affect GNSS/GPS performance.
- What actions would you take to mitigate these issues?
Minimum Performance/Knowledge: B
Evaluation Guidance: The proctor should evaluate whether the RPIC demonstrates an understanding of how GNSS/GPS technology provides critical positional and altitude data. The RPIC should be able to explain the impact of solar weather events, such as solar flares, and terrestrial interference, such as buildings or electromagnetic signals, on GNSS/GPS accuracy. Mitigation strategies such as adjusting the flight path, switching to manual control, or moving the RPIC to a different position should be mentioned.
Sample Response: “GNSS/GPS technology is critical for providing accurate position and altitude data during UAS operations by triangulating signals from multiple satellites to determine the UASʼs exact location in three-dimensional space. The GPS component primarily helps with positioning and navigation by using these satellite signals to provide real-time data, which the UAS uses to maintain stable flight and execute automated functions.
“However, this system can be affected by external factors like solar weather or terrestrial interference. For example, solar flares or storms can disrupt the signals sent by satellites, leading to inaccuracies in the position and altitude data. Additionally, terrestrial interference, such as large buildings, metal structures, or sources of electromagnetic radiation, can block or reflect the satellite signals, causing the UAS to lose accuracy in its location tracking.
“If I noticed altitude or position fluctuations due to these issues, I would first attempt to adjust the flight path to avoid areas with strong interference, such as moving away from tall structures or electromagnetic sources. I could also switch to manual control to maintain a safe and stable flight until the signal improves. Additionally, I might reposition myself as the RPIC to a different area that offers better line of sight to the UAS. Finally, if the issue persisted, I would consider safely landing the UAS and postponing the mission until conditions improve to avoid any risks.”
Applicable ASTM Sections: 6.2.5.1, 6.2.5.2, 6.2.5.3
8. Unresponsive Controls and Flyaway During Flight
Question: Explain the steps you would follow if the following scenarios were to occur. The scenarios are unrelated to each other.
- You maintain visual line of sight (VLOS) of the UAS and have radio control but lose the video link and telemetry data on the controller.
- You lose VLOS of the UAS, but the controls and video feed remain responsive.
- You maintain VLOS of the UAS but lose radio control, and the aircraft starts to fly away.
Minimum Performance/Knowledge: 3b
Evaluation Guidance:
- The RPIC should carefully fly the UAS back to a safe location and land. After landing, the RPIC should restart the equipment and try to reestablish full control of the aircraft. Once control is reestablished, the RPIC should conduct several test missions to ensure all equipment is functioning normally.
- The RPIC should attempt to reacquire the location by looking around the mission site and searching for familiar objects from the video feed on the controller. If the RPIC is not able to locate the UAS, they should attempt to ascend for several seconds in the hope the motion of the UAS will be visible. If, after several attempts to find the UAS fail, the RPIC can use the return-to-home feature to monitor the video feed to ensure the UAS doesnʼt collide with an object.
- The RPIC should attempt to regain control by engaging the RTH feature (if possible) or restarting the controller. After efforts to regain control fail, they make note of the droneʼs last known position, the direction it is flying in, and battery life. The RPIC can also show competency by indicating they would notify the ground crew of the situation and ask them to track the drone.
Sample Response:
- “If I were to lose the video link and telemetry data for the Acme AirBurg 1000 while still having VLOS and radio control, I would remain calm and maintain control of the UAS. My first action would be to carefully fly the UAS back to a safe, open area where I could land it. Once the UAS was landed, I would shut down and restart both the aircraft and controller to attempt to reestablish full functionality. After regaining video and telemetry data, I would conduct a few short test flights to ensure that all systems are working properly before resuming the mission.
- “If I lost VLOS but the controls were still responsive, I would attempt to regain VLOS immediately. I would first look around the mission site, scanning the area to reacquire the UAS visually. If that failed, I would ascend the UAS for a few seconds, hoping to spot its motion against the surroundings. If I still couldnʼt regain sight of it after several attempts, I would activate the RTH feature and carefully monitor any available video feed or telemetry data to ensure the UAS returned safely without encountering any obstacles.
- “Finally, if the Acme AirBurg 1000 became unresponsive to my controls and began to fly away, the first thing I would do is attempt to regain control by engaging the RTH feature. If that didnʼt work, Iʼd try restarting the controller, as a simple connection issue could be causing the unresponsiveness. If neither action restored control, I would immediately make note of the droneʼs last known position, the direction it was heading, and how much battery life remained. I would also notify the ground crew of the situation and ask them to assist in visually tracking the drone while I continued to monitor it on the flight display.”
Applicable ASTM Sections: 6.3.2.3, 6.4.1.4, 6.4.2.8
9. Proper Maintenance Documentation
Question: Assume that during a routine mission, the [UAS used for exam] makes contact with tall grass while landing. The UAS did not crash, but a propeller was damaged and must be replaced before the next mission. Demonstrate to the proctor how you would document this incident.
Minimum Performance/Knowledge: Assume 3b (not indicated in standard)
Evaluation Guidance: The proctor should evaluate the RPICʼs understanding of how to accurately document the damage and corrective actions in the maintenance logbook and any other steps required by the RPICʼs agency. The RPIC should demonstrate an understanding of all aspects and fillable fields of the agencyʼs standard maintenance logbook and detail the corrective actions made to the UAS.
Sample Response: “After the Acme AirBurg 1000 made contact with tall grass during landing, resulting in damage to a propeller, I would first note the incident in the maintenance logbook under the appropriate mission record. I would document the date, time, and location of the incident, along with a brief description of what happened. I would then detail the corrective action, stating that the damaged propeller was replaced with a new one. My agency requires that I also log the part number of the replacement propeller and conduct a postrepair flight check to ensure the UAS is operating properly before the next mission. Finally, I would ensure the documentation is signed and completed in compliance with the agencyʼs protocol.”
Applicable ASTM Sections: 6.3.3.3
10. Cleaning UAS and Sensor
Question: Assume that the [UAS used for exam] has taken off and landed repeatedly in a dusty bare-earth construction site. As a result, excessive dust has accumulated on the sensors. Describe the appropriate way in which the sensors are cleaned.
Minimum Performance/Knowledge: 3, b, and B
Evaluation Guidance: The proctor should evaluate the RPICʼs understanding of how to properly clean the sensors of a UAS. The RPIC should demonstrate knowledge of the appropriate cleaning techniques without damaging the sensors. This may include using a soft, lint-free microfiber cloth, compressed air in controlled bursts, and, when necessary, isopropyl alcohol applied to a
cloth for more thorough cleaning. The RPIC should use extreme caution before using harsher methods, such as using abrasive materials or spraying liquids directly onto the sensors. Additionally, the RPIC should explain the importance of verifying sensor functionality after cleaning by performing a preflight inspection. It is important to note that different types of sensors may have specific cleaning requirements, so the RPIC should always consult the manufacturerʼs manual for guidance on proper maintenance procedures.
Sample Response: “I would first inspect the sensors to see how much dust had accumulated. Using a microfiber cloth, I would gently wipe the sensors clean to avoid scratching. For hard-to-reach areas, Iʼd use short bursts of compressed air. If the dust doesnʼt come off easily, Iʼd apply a small amount of isopropyl alcohol to the cloth and clean the sensors carefully. After cleaning, Iʼd conduct a preflight inspection to ensure all sensors are functioning properly.”
Applicable ASTM Sections: 6.3.1.1, 6.3.7.5
11. Aviation Radio Monitoring and Aircraft Proximity Awareness
Question: When monitoring the common traffic advisory frequency (CTAF) near an uncontrolled airport, you hear the following transmission: “Cessna N6782C entering left downwind for Runway 35.” Your UAS mission is near the runway directly to the west.
- Describe the actions you would take to determine the proximity of the aircraft.
- Based on the available information, what actions would you take?
Minimum Performance/Knowledge: B
Evaluation Guidance: The proctor should evaluate the pilotʼs comprehension of radio transmission by determining whether the pilot understands the aircraftʼs position and intentions using standard aviation phraseology. The pilot must recognize the aircraftʼs location relative to the runway and the traffic direction. Additionally, the pilot should demonstrate situational awareness by assessing the proximity of the aircraft to their UAS operations, referencing the runwayʼs location and pattern altitude, and determining if the aircraft presents a potential conflict based on its flight phase (such as downwind, base, or final). The pilot must also identify appropriate safety actions to maintain separation between the UAS and the manned aircraft, such as adjusting the UAS flight plan or landing if necessary. Lastly, the pilot should demonstrate knowledge of applicable FAA regulations concerning operations near airports and crewed aircraft.
Sample Response: “The transmission indicates that Cessna 345 is on the downwind leg of the traffic pattern for Runway 35, which means the aircraft is flying parallel to the runway, preparing to turn onto base and final. Because it is Runway 35, it is pointing to 350 degrees, which is almost due north. It is a left-hand pattern, so the aircraft is west of the runway. The question indicates that the mission site is near the airport and also west of the runway. Based on the information provided, the aircraft and UAS are in the approximate same area, and I would need to take immediate actions to avoid collision.”
Applicable ASTM Sections: 6.2.9.2
Part 2: Aircraft Capabilities and Functionality
Instructions: In this part of the exam, the proctor asks the RPIC a series of questions concerning the aircraft used in this examʼs capabilities and functionality. The RPIC will be required to energize the UAS system and demonstrate proficiency in operating its controls and settings and in reading telemetry data. The RPIC is allowed to use relevant tools and resources that would typically be available during mission planning, such as the manufacturerʼs specifications
and flight manuals. However, the RPIC may not seek assistance from anyone. This portion of the exam can be completed away from the mission site. Depending on the situation, and at the proctorʼs discretion, aborting a mission may be the most appropriate course of action. For safety reasons, if this part of the assessment is conducted indoors, it is advised that the propellers be removed from the aircraft and kept off until Part 3 of the assessment begins.
12. Physical Components of UAS
Question: Remove the [UAS used for exam] from its case, unfold all components, attach any payloads, insert memory cards, remove gimbal locks, and perform all other activities to prepare the aircraft for flight. If indoors, do not attach the propellers, and do not power on the aircraft. The proctor will point to various physical components of the [UAS used for exam]. Explain their function and how they contribute to the operation of the aircraft.
Minimum Performance/Knowledge: B
Evaluation Guidance: The proctor should assess whether the RPIC can set up the drone correctly and identify the hub, boom, and layout configuration of the multirotor. The RPIC should demonstrate a clear understanding of the aircraftʼs propellers, lights, motors, battery, camera, gimbal, sensors, controllers, and any other major component of the aircraft.
Sample Response: “On the Acme AirBurg 1000, the major physical parts include the hub, which is the central part of the UAS where the main body connects to all the other components. The booms are the arms extending from the hub, each of which holds a motor and propeller at its end. The layout of this UAS is a quadcopter configuration, meaning it has four booms and four propellers.
“The propellers generate lift and are powered by the motors, which control the speed and direction of the aircraft. The battery supplies power to all the electronic components of the UAS, including the motors and sensors. The camera, mounted on the gimbal, captures images or video during flight. The gimbal stabilizes the camera, ensuring smooth footage even when the UAS is in motion. The sensors, such as GPS and obstacle-detection sensors, help with navigation and with avoiding collisions. Lastly, the controller communicates with the UAS and allows me to input commands, such as adjusting altitude, direction, and speed.”
Applicable ASTM Sections: 6.2.3
13. UAS Controller Inputs and Telemetry Data Overview
Question: Power on the [UAS used for exam] and explain to the proctor the function of every control input (physical and electronic) and the telemetry data display on the controller. This should include the following:
- Battery level,
- Control frequency strength,
- Autonomous RTH settings,
- Flight control parameters,
- Verification of firmware version, and
- Any and all relevant control input.
Minimum Performance/Knowledge: 3, b, and B
Evaluation Guidance: The proctor should evaluate the RPICʼs comprehensive understanding of both physical and electronic elements of the UAS controller. The RPIC should be able to explain each button, switch, stick, and touchscreen input in detail, including their use in normal
and emergency operations. Additionally, the RPIC must demonstrate the ability to read and interpret telemetry data, including battery status, control signal strength, and flight modes. The RPIC should accurately describe how to set and adjust flight parameters such as the RTH altitude.
Sample Response: “To power on the Acme AirBurg 1000, I first press and hold the power button on both the UAS and the controller until they connect. I will now explain the functions of each control input and the telemetry data on the controller when the UAS is powered on.
“The physical controls include the left and right joysticks. The left joystick controls throttle and yaw, allowing me to adjust altitude and rotate the aircraft. The right joystick controls pitch and roll, which moves the aircraft forward, backward, and side to side. There are also dedicated buttons for. . . .
“On the touchscreen, I can access various electronic inputs and telemetry data. For example, I can monitor the. . . .
“Before flying, I verify the firmware version to ensure itʼs up to date, as outdated firmware could lead to errors during flight. The telemetry screen also shows the current flight mode, such as GPS or Attitude (ATTI) mode, and any flight warnings. Lastly, I can verify the control frequency strength, ensuring Iʼm operating on a reliable frequency for a stable connection.”
Applicable ASTM Sections: 6.3.1.7, 6.3.1.9, 6.3.1.10, 6.4.1.2
14. UAS Automation and Procedures for Link Loss
Question: Assume that you have been tasked with inspecting the concrete delamination of a bridge structure. The UAS must navigate above and below the bridge deck to view the delamination. During the inspection, you lose the command-and-control link between the transmitter and the UAS.
- What actions would you take to manage the situation?
- Explain what UAS automation should be programmed when a sustained loss of link occurs.
- Demonstrate how this behavior is programmed into the [UAS used for exam] controller.
Minimum Performance/Knowledge: B
Evaluation Guidance: The proctor should evaluate the RPICʼs understanding of what UAS preprogrammed behavior should occur when a link is lost. The proctor should observe the RPIC explaining different actions based on different inspections or conditions. For instance, hovering might be suitable for under-bridge inspections, while immediately climbing to 400 feet and returning home could be more appropriate for open-air inspections. The RPIC should explain these functions clearly and provide logical steps they would take to ensure safety, including checking whether the link can be reestablished, ensuring a safe environment for RTH or landing, and how to communicate the situation to the crew. The RPIC should also demonstrate an understanding of how to program these behaviors prior to the mission.
Sample Response: “If I lose the command-and-control link between the transmitter and the drone, I may have to rely on the UASʼs preprogrammed automation to handle the situation. For a bridge inspection, especially one under the structure, it is often best to program the UAS to hover for a specified duration upon losing the link. This gives time to assess whether the issue can be resolved quickly, which would allow for reconnection. Hovering prevents the UAS from unintentionally colliding with the bridge or flying into hazardous areas.
“However, if hovering is not a viable solution due to a prolonged loss of link, I would have programmed the UAS to initiate an RTH sequence. For a bridge inspection, I might set the UAS to ascend to a safe altitude, typically around 350 feet, to clear any obstacles before returning to
the home point. This approach minimizes the risk of collision while ensuring the UAS can safely navigate back to the starting point.
“In this scenario, my immediate actions would include attempting to re-establish the link by troubleshooting the transmitter and checking for interference or signal obstructions. I would also notify my crew of the situation and ensure the area is clear and safe for an automated return or landing. Before beginning the mission, I would have programmed the drone with these automated behaviors through the controller interface, specifying the hover time and RTH altitude to suit the specific environment of the bridge inspection.”
Applicable ASTM Sections: 6.3.1.8
15. Flight Modes and Stability Features
Question: During a UAS mission, different flight modes and automated flight controls (e.g., obstacle avoidance and stability augmentation technology) can help enhance flight performance and safety.
- Describe to the proctor how you would switch between various flight obstacle avoidance modes on the [UAS used for exam] and explain the purpose of each mode.
- Describe how the obstacle avoidance features impact the UAS during flight, particularly in challenging conditions such as strong winds or sudden movements. Be sure to highlight how and when you would use these systems during a typical mission.
Minimum Performance/Knowledge: B
Evaluation Guidance: The proctor should assess the RPICʼs ability to correctly identify and switch between different flight modes, such as manual, GNSS/GPS-assisted, and autonomous modes. The RPIC should demonstrate an understanding of the purpose of each mode and explain when it is most appropriate to use each mode based on mission conditions. The RPIC must also explain how stability augmentation technology, such as auto-hover or obstacle avoidance, helps maintain control of the UAS, particularly in challenging environments.
Sample Response: “On the Acme AirBurg 1000, I can switch between different flight modes by using the controllerʼs mode switch or through the flight control app, depending on the missionʼs needs. The main flight modes include ATTI mode, GNSS/GPS-assisted mode, and autonomous flight mode.
“ATTI mode is used when I want full control over the UAS without any assistance. I rarely use this mode, except when Iʼm in a GPS-denied environment or am using it to practice being in a GPS-denied environment.
“In GNSS/GPS-assisted mode, the UAS uses satellite positioning to hold its position automatically, providing a stable hover and smooth flight even when I release the controls. This is the mode I would use most frequently during missions, particularly in areas where stability is crucial, such as during inspections or in windier conditions. This mode helps counteract drift from wind and other external factors, allowing me to focus on the task rather than maintaining the UASʼs position.
“Autonomous mode allows the UAS to follow a preprogrammed flight path using waypoints, which is useful for repetitive tasks such as mapping or large-area inspections. The UAS can perform these missions with minimal pilot input, reducing the risk of human error and ensuring the mission is carried out exactly as planned.
“Stability augmentation technologies such as auto-hover and obstacle avoidance are crucial for ensuring a safe and controlled flight. Auto-hover maintains the UASʼs altitude and position
without requiring manual input, which is especially useful in strong winds or when sudden movements are needed to avoid obstacles. Obstacle avoidance uses sensors to detect and avoid collisions by either stopping or rerouting the UAS. I try not to rely on these features during missions; however, they are a nice safety feature to have.”
Applicable ASTM Sections: 6.2.4
16. Understanding and Accessing UAS Geofencing
Question: Some UASs have geofencing.
- Explain to the proctor what geofencing is with respect to [UAS used for exam] navigation.
- Where might you encounter manufacturer-imposed geofencing?
- Demonstrate to the proctor the process for locating the [UAS used for exam] geofences and how to modify or disable them.
Minimum Performance/Knowledge: B
Evaluation Guidance: The RPIC must be able to explain that a manufacturer-imposed geofence is an artificial boundary set by the manufacturer to restrict UAS operation within a designated area. These geofenced zones are typically established to prevent flights in regulatorily restricted areas or during temporary events or hazards. The UASʼs GNSS/GPS module is used to determine its location and prevent entry into the geofenced zone. The RPIC should also be able to identify geofenced areas for the [UAS used for exam] and, if feasible, obtain access to them.
Sample Response: “Geofencing is a technology built into the UAS that creates a virtual boundary around certain areas to restrict or prevent the drone from flying into them. These boundaries are typically set by the manufacturer and are designed to keep drones out of places such as airports, military installations, or temporary event locations where drone operations are restricted by regulations or safety concerns. The Acme AirBurg 1000 uses its GNSS, or GPS system, to determine its position and compare it to these geofenced areas. If the drone approaches one of these zones, the geofencing feature will stop it from entering.
“To locate the geofences for the Acme AirBurg 1000, I would use the flight planning app that is connected to the UAS, which usually displays restricted areas on the map before takeoff. In the app, I can identify the zones that are geofenced by looking for highlighted areas or specific icons that mark restricted zones. If I need to gain entry into one of these zones—assuming I have the appropriate permissions, such as an FAA waiver—I would follow the manufacturerʼs steps to unlock the geofence. This usually involves submitting a request through the app, verifying my credentials, and receiving an unlock code that temporarily disables the geofence for that specific flight. Once the unlock is processed, I can enter the restricted area with the UAS, as long as I comply with all other regulatory requirements.”
Applicable ASTM Sections: 6.2.5.4
17. Max Range of UAS
Question: What is the maximum range under ideal conditions where the controller can reliably operate the [UAS used for exam]? What factors may reduce this range?
Minimum Performance/Knowledge: B
Evaluation Guidance: The proctor should evaluate the RPICʼs understanding of the maximum control range for the specific UAS model used in the exam. The RPIC should accurately reference the manufacturerʼs specifications for the maximum distance at which the controller can reliably
communicate with the aircraft under optimal conditions. The proctor should also assess the RPICʼs awareness of factors that may reduce the effective control range, such as interference from obstacles and dense structures. Additionally, the RPIC should demonstrate an understanding of the need to maintain a VLOS during flight, even if the UAS hardware allows for longer distances.
Sample Response: “The maximum control range for the Acme AirBurg 1000 under ideal conditions, according to the manufacturerʼs specifications, is approximately 6 miles, or about 10 kilometers. This range assumes clear weather, no physical obstructions, and minimal radio frequency interference. However, several factors can reduce this range. For instance, interference from nearby structures such as buildings, power lines, or even dense vegetation can block or weaken the signal between the controller and the aircraft. Additionally, other sources of radio frequency interference, such as Wi-Fi signals or other drones operating in the same area, may reduce the effective range. Itʼs also important to note that while the UAS is capable of operating at these distances, I must always maintain a VLOS. I can generally see the AirBurg about a half a mile away, so that is the actual limit of how far I can fly that aircraft.”
Applicable ASTM Sections: 6.2.3.6, 6.3.1.1
18. Mitigation Strategies Operations in Extreme Temperature
Question: Assume you are preparing to conduct an inspection of a highway on a very [proctor: select “hot summer” or “cold winter”] day using a [UAS used for exam]. The outside temperature is expected to reach [proctor: select “101°F” or “–2°F”].
- Does the weather described exceed the aircraftʼs operational limitations?
- What steps would you take to mitigate the effects of excessive temperatures on the UAS if the manufacturer has not provided sufficient performance information for such conditions?
- Do the weather conditions exceed the organizationʼs policies for UAS missions?
Minimum Performance/Knowledge: 2, b, and B
Evaluation Guidance: The proctor should assess the RPICʼs ability to consult the manufacturerʼs data and identify whether it includes guidance on operating in extreme temperatures. If the data are not available, the RPIC should demonstrate an understanding of alternative resources, such as ASTM F3298, and explain how they would apply standard mitigation strategies for excessive temperatures. The RPIC should mention checking key systems (battery, motor, electronics) and implementing measures such as adjusting flight times, limiting flight duration, and monitoring the UAS for signs of overheating in extreme heat and the need to warm batteries in extreme cold. The RPIC should also address the need to wear climate-specific clothing. If the agency has a policy specifying the minimum and maximum weather conditions permitted for a UAS mission, the RPIC should include this information in their response.
Sample Response: “To verify whether the weather conditions exceed the manufacturerʼs requirements for operating the Acme AirBurg 1000, I would first consult the user manual or any provided documentation from Acme to check for specific operating temperature ranges. If the manufacturer has listed a maximum operating temperature, I would compare that with the expected outside temperature of 101°F (38°C).
“In the absence of detailed manufacturer data, I would take several steps to mitigate the effects of the excessive heat. First, I would shorten the flight time to reduce strain on the battery, as batteries tend to overheat faster in high temperatures. I would also monitor the UASʼs motor and electronic components closely during the flight, watching for any signs of overheating, such as unusual behavior or warnings from the flight controller. If possible, I would conduct the inspection during the cooler parts of the day, such as early morning or late afternoon, to further
minimize heat exposure. Additionally, I would have a backup battery ready to swap out and allow the drone to cool down between flights to prevent prolonged exposure to the heat.
“To verify whether the weather conditions exceed the manufacturerʼs requirements for operating the Acme AirBurg 1000 in extreme cold temperatures, I would first consult the user manual or any provided documentation from Acme to check for specific operating temperature ranges. If the manufacturer has listed a minimum operating temperature, I would compare that with the expected outside temperature of –2°F (–19°C).
“In the absence of detailed manufacturer data, I would take several steps to mitigate the effects of the extreme cold. First, I would ensure the batteries are kept warm before the flight, either by storing them in a warm environment or using battery-warming devices, as cold temperatures can reduce battery efficiency and life. I would also shorten the flight time, as battery performance can degrade quickly in cold conditions. During the flight, I would monitor the UASʼs performance closely, paying attention to any unusual behavior or low battery warnings. Additionally, I would ensure that the UAS and its components, such as sensors and motors, are not exposed to the cold for extended periods before or after the flight, and I would avoid powering the UAS on for too long before takeoff. If possible, I would also plan the flight during the warmest part of the day to minimize the impact of the cold. Finally, I would have spare, prewarmed batteries available and allow the UAS to rest between flights to avoid prolonged cold exposure.”
Applicable ASTM Sections: 6.3.1.1, 6.3.1.2, 6.3.2.1, 6.3.3.1
19. Battery Safety Assessment
Question: Assume you are preparing to conduct a mapping mission of a borrow pit. Itʼs a warm day, and your UAS batteries have been stored in your vehicle. Prior to the flight, you notice that some of the batteries were exposed to direct sunlight for several hours.
- How would you assess the condition of these batteries before the flight?
- What steps would you take to ensure they are safe for use?
- Explain any precautionary steps you would take when charging multiple batteries outside under these conditions for an extended mission.
Minimum Performance/Knowledge: B
Evaluation Guidance: The proctor should evaluate the RPICʼs understanding of proper battery handling and safety protocols. This would include inspecting the battery for excessive heat once removed from direct sunlight and any visible signs of defects, such as bulges or leakage. Precautionary steps include charging the batteries in a shaded area and looking to see if the batteries charge at an unusually fast or slow pace. The proctor should look for clear, methodical decision-making and appropriate mitigations if battery safety is in question.
Sample Response: “First, I would remove the batteries from the vehicle and inspect them for any visible signs of damage, such as bulging, leaking, or any unusual odors. After visually inspecting them, I would feel the batteries to assess their temperature. If the batteries are excessively warm to the touch, I would allow them to cool down in a shaded, well-ventilated area before considering their use. Itʼs essential to avoid using a battery that is too hot, as this can lead to reduced performance or, worse, cause a malfunction during flight. I would also use a battery management system, if available, to check for any internal battery health indicators such as voltage irregularities or charge levels.
“When it comes to charging multiple batteries outside for an extended mission, I would take several precautions. First, I would set up my charging station in a shaded area to prevent overheating during the charging process. I would monitor the charging speed to ensure that the
batteries arenʼt charging too quickly or slowly, which could be a sign of an underlying issue. Additionally, I would rotate through the batteries, ensuring I donʼt charge them consecutively without allowing sufficient cool-down time between flights and charges. Lastly, I would always use manufacturer-recommended chargers and avoid charging the batteries unattended for long periods, especially in direct sunlight.”
Applicable ASTM Sections: 6.3.1.6
20. Proper Use, Maintenance, and Disposal of UAS Batteries
Question: The [UAS used for exam] relies on batteries as its power source to sustain flight operations.
- Describe proper use, maintenance, safe charging, and storage for [UAS used for exam] batteries.
- What are the signs of a defective battery?
- How do you properly dispose of a defective battery?
Minimum Performance/Knowledge: B
Evaluation Guidance: The proctor should assess the RPICʼs understanding of the manufacturerʼs guidelines for the proper use, maintenance, charging, and storage of the UASʼs batteries. This will likely include explaining the importance of avoiding overcharging or completely depleting the battery, as well as the procedures for monitoring battery health over time. With regard to storage, the RPIC should describe best practices for storing batteries, including maintaining them at an appropriate charge level, avoiding extreme temperatures, and ensuring they are stored in a safe, dry environment. The RPIC must demonstrate knowledge of visual and performance-related indicators of battery defects, such as physical deformities (e.g., swelling, cracks, leakage), irregular charge/discharge behavior, unusually short flight times, or difficulties in holding a charge.
Sample Response: “To properly use, maintain, and care for the batteries of the Acme AirBurg 1000, I follow the manufacturerʼs guidelines closely. First, I make sure not to overcharge the batteries by removing them from the charger once they reach full capacity, and I avoid letting the battery deplete completely before recharging. For safe charging, I only use the charger recommended by Acme, and I charge the batteries in a well-ventilated area away from flammable materials. As for maintenance, I regularly inspect the batteries for any signs of damage, such as swelling, cracks, or leakage, and I monitor the batteryʼs performance during flights to ensure it holds a charge as expected.
“When storing the batteries, I keep them in a cool, dry place, ideally at about 50% charge if they wonʼt be used for an extended period. I also avoid exposing them to extreme temperatures, both high and low, as this can damage the battery. I check for signs of a defective battery by looking for physical deformities, such as swelling or cracks, and I pay attention to changes in performance, such as a reduced flight time or difficulty holding a charge. If I identify a defective battery, I follow proper disposal protocols by taking it to a battery recycling facility or a designated hazardous waste disposal site and never throw it in regular trash, to avoid environmental damage or potential hazards.”
Applicable ASTM Sections: 6.3.1.6
21. Pre-Mission Procedures
Question: You are about to begin Part 3 of the assessment, where you will proceed to the field to perform a series of flight maneuvers simulating a UAS mission. Assume you are preparing to leave your office for the mission site.
- Outline the pre-mission procedures and specific tasks you complete to ensure you are fully prepared before departing for the mission site.
- Identify any assumptions made during the pre-mission phase that could potentially change upon arrival at the mission site for a typical mission you might be asked to conduct.
Minimum Performance/Knowledge: 3b
Evaluation Guidance: The RPIC should outline the following key tasks and considerations for pre-mission preparation and discuss how assumptions made during pre-mission planning might change upon arrival at the mission site. While answers may vary, they should demonstrate a clear understanding of preparation steps, agency-specific mission requirements, risk management, and adaptability if the mission planning assumptions change.
Key Elements to Cover:
- Predeparture tasks:
- Review of mission objectives and scope;
- Verification of airspace, TFRs, or NOTAMs;
- Confirmation of weather conditions and forecast;
- Verification of UAS functionality, including battery readiness and equipment inspection;
- Ensurance that all required payloads and accessories are packed;
- Preparation and review of flight and contingency plans;
- Verification of regulatory and agency requirements (e.g., waivers, permits, or approvals);
- Documentation including, at a minimum, a flight log, checklists, and any agency requirements; and
- Coordination with crew members and briefing on roles.
- Assumptions that may change:
- Weather conditions differing from forecasts;
- Presence of unexpected hazards at the site, such as new obstacles or restricted areas;
- Changes in terrain accessibility or conditions (e.g., muddy ground, construction activity);
- Public interference; and
- Takeoff and landing areas.
Sample Response: “Before leaving for the mission site, I would first review the mission objectives to ensure I am clear on the goals and scope of the operation. I would check the latest weather reports and forecasts to confirm that conditions are within acceptable limits for safe operations. I would also conduct a preflight inspection of the UAS to ensure all systems are functional, firmware is updated, batteries are fully charged, and spares are packed. Additionally, I would verify that the payload is correctly installed and ready for deployment, with any required accessories or tools included.
“I would prepare a detailed checklist to confirm that all equipment is accounted for, including the UAS, remote controller, batteries, spare parts, tools, visual aids, and personal protective equipment. I would also ensure we have all necessary documentation, such as FAA waivers, authorizations, or permits, and would verify that communication devices, such as radios or cell phones, are working and fully charged.
“Finally, I would hold a briefing with the crew to review roles and the mission plan. This includes discussing the primary objectives, flight plan, emergency procedures, and any updates on expected hazards.
“I recognize that, once at the mission site, certain assumptions made during pre-mission planning may need to be adjusted. For instance, weather conditions may be different from those predicted, such as unexpected gusts of wind or poor visibility. There may also be unforeseen hazards, such as new construction or the presence of people in previously clear areas. The terrain
or landing zones I planned for might be unsuitable due to debris, slopes, or other environmental changes. Additionally, I am prepared to adapt if there is a change in the mission scope or last-minute stakeholder requirements. These possibilities are why I always carry a backup plan and remain flexible and observant upon arrival.”
Applicable ASTM Sections: 6.3.6, 6.3.6.1, 6.3.6.2, 6.3.6.3, 6.3.6.4, 6.3.7.5
Part 3: Check Ride
Instructions: In this part of the exam, the proctor asks the RPIC to perform a series of roleplay activities and scenario-based maneuvers. The proctor begins this part by asking the RPIC questions about activities that occur immediately before a mission to test their mission planning abilities. The proctor then asks the RPIC to perform maneuvers and flight activities to test their fight proficiency. The RPIC is allowed to use relevant tools and resources that would typically be available during mission planning, such as checklists and tools provided by the RPICʼs agency. This portion of the exam is completed at the mission site.
22. Conducting a Site Survey and Documenting Pre-Mission Procedures
Question: You are about to begin a UAS mission at your current location.
- Conduct a site survey of the area, paying special attention to any hazards. Demonstrate your pre-mission procedures and risk mitigation steps to the proctor.
- Show the proctor how to adjust flight parameters or modify the pre-mission plan based on findings from the site survey.
Minimum Performance/Knowledge: 3b
Evaluation Guidance: The proctor should assess the RPICʼs ability to follow their agencyʼs standard pre-mission checklist while conducting a comprehensive site survey. This includes identifying potential hazards (e.g., power lines, structures, and wildlife). The RPIC must clearly explain how these hazards are documented in the mission planning document and provide a clear outline of the flight objective.
The proctor should evaluate whether the RPIC uses the checklist to verify all preflight steps, including equipment status and crew readiness. The RPICʼs understanding of weather conditions (both solar and terrestrial) and how they interact with the terrain and nearby structures should also be assessed.
Additionally, the RPIC must demonstrate an ability to assess operational risk, taking into account the physical and mental condition of the crew, the complexity of the flight path, and any environmental limitations. Proper use of the pre-mission checklist to ensure that all safety and planning procedures are followed consistently will be key in evaluating the RPICʼs preparedness and risk management capabilities.
Sample Response: “Before starting the mission at this site, I would first conduct a thorough survey of the area. I can see that there are several tall pine trees surrounding the location, which could pose a hazard to the flight path. Additionally, thereʼs a busy highway nearby, so Iʼll need to be cautious about staying clear of the roadway to avoid flying over traffic or distracting drivers. I also noticed that thereʼs a lake close by, and Iʼve observed some aggressive geese in the area. Iʼll need to plan the flight to avoid flying too close to the lake to minimize the risk of wildlife interference.
“After completing the site survey, I would document the objective of the flight. In this case, the mission is to capture aerial imagery of the site to monitor vegetation and assess any changes in tree density. This would be recorded under the “Flight Objective” section of the pre-mission checklist. For pre-mission procedures, I would ensure the Acme AirBurg 1000ʼs battery is fully charged, check weather conditions for any unexpected winds that could affect flight, and verify GPS signal strength.
“Next, I would complete my agencyʼs pre-mission checklist to ensure all required steps are taken. This includes verifying that all personnel are briefed on the mission, ensuring the area is secure, and confirming that I have the appropriate airspace clearance if needed. I would double-check the calibration of the UAS, including the compass and inertial measurement unit (IMU), and confirm that the firmware is updated.
“For risk mitigation, I would adjust the flight path to keep a safe distance from the tall pine trees and stay at a higher altitude during flight. To avoid the busy highway, I would make sure the operational area is well within the boundaries of the site and does not drift toward the road. To mitigate the risk from the aggressive geese near the lake, I would plan to fly away from the water and remain vigilant during the flight, prepared to land quickly if the geese become a threat. All of these hazards and mitigation steps would be documented in the mission planning document to ensure the safety of the operation.”
Applicable ASTM Sections: 6.3.2.3, 6.3.5.1, 6.3.6.1, 6.3.6.2, 6.3.6.3, 6.3.6.4, 6.3.7.1, 6.3.7.2, 6.3.7.3, 6.3.7.5, 6.4.1.1, 6.4.2.2
23. Pre-Mission Briefing and Crew Coordination
Question: You are about to begin a UAS mission at your current location, where you will take images of the NIST test course from altitudes that range from 5 feet to 300 feet above ground level (AGL). Conduct a mock pre-mission briefing where you communicate all pertinent items related to the mission. Do not launch the UAS at this time.
Minimum Performance/Knowledge: 3, b, and B
Evaluation Guidance: The proctor should roleplay as a member of the crew and ask questions based on the real-time response of the RPIC. The proctor should assess how the RPIC applies crew resource management (CRM) and threat and error management (TEM) principles in real time with the crew. The RPIC should demonstrate strong leadership by clearly assigning roles, conducting thorough planning, assessing the crewʼs physical and mental health, and making decisions based on crew inputs and situational factors. The RPIC should effectively communicate with the crew member operating the controls and with the visual observers (VOs) to ensure everyone is aware of their responsibilities and the overall mission objectives.
Sample Response:
RPIC: “Alright, team, before we begin the mission, letʼs go over the pre-mission briefing. Today, weʼll be capturing images of the NIST test course at altitudes ranging from 25 feet to 350 feet AGL. Iʼll be the RPIC, so Iʼm responsible for overseeing the mission and making sure everything goes smoothly. [Pilot], youʼll be manipulating the controls for the Acme AirBurg 1000, and [VO1] and [VO2], youʼre both visual observers. Letʼs make sure everyone knows their roles and responsibilities.”
Pilot: “Got it. So, just to confirm, Iʼll be waiting on your commands for altitude changes, right? I shouldnʼt adjust anything unless you give the signal?”
RPIC: “Exactly. Iʼll give you clear instructions on when to adjust altitude or camera position. We need to stay coordinated to capture the images correctly and to make sure weʼre operating safely. Iʼll also let you know if we need to pause or adjust based on any situational changes.”
VO1: “And weʼre maintaining visual line of sight the entire time, correct?”
RPIC: “Correct. Your main responsibility is to keep eyes on the UAS at all times. If you see any obstructions, like birds or buildings, or anything that could interfere with the UAS, report it to me immediately. Weʼre also keeping an eye on the weather, so if you notice any sudden changes—wind shifts, for example—let me know right away.”
Pilot: “What if weʼre flying at a higher altitude and something enters the airspace below us? Should I bring it down right away?”
RPIC: “No, donʼt act on your own. If anything enters our airspace or seems like a potential hazard, alert me first. Iʼll make the call on whether we need to adjust the flight path or altitude. Weʼll be practicing strong crew resource management, so everyoneʼs input is important, but no one acts independently.”
VO2: “If we see something risky, should we shout it out right away or wait for a good moment?”
RPIC: “Safety comes first, so if you see something risky, speak up immediately. I want real-time feedback from all of you. That includes any concerns you have about the flight or the environment. If something doesnʼt feel right, let me know as soon as possible.”
Pilot: “And for threat and error management, if something goes wrong, do we abort immediately, or is there a pause for assessment?”
RPIC: “Weʼll assess first, unless itʼs an emergency. Iʼll call for an immediate stop if necessary, but otherwise, weʼll pause to evaluate the situation and decide the best course of action as a team.”
VO1: “Got it. Weʼre watching for obstructions and weather, and if anything seems off, we report it right away.”
RPIC: “Exactly. Now, before we launch, weʼll run through the final equipment check—confirm GPS signal, battery levels, and make sure the takeoff area is clear. Weʼll also review the airspace for any low-altitude aircraft or temporary flight restrictions.”
VO2: “Sounds good. Do we need to check anything else?”
RPIC: “Nope, that covers it. If everyoneʼs clear on their roles and responsibilities, weʼll proceed with the checks. Any final questions?”
Pilot: “Nope, Iʼm good.”
VO1: “All clear.”
VO2: “Good here too.”
RPIC: “Alright, letʼs move forward and get this done safely.”
Applicable ASTM Sections: 6.3.2.3, 6.3.4.1, 6.3.7.6, 6.3.8, 6.3.8.1, 6.3.8.2, 6.3.8.3, 6.3.8.4, 6.3.8.5, 6.3.8.6, 6.3.8.7, 6.4.2.2
24. Prelaunch Setup and Equipment Preparation
Question: You are about to begin a UAS mission at your current location. Demonstrate to the proctor the physical steps you would take to prepare the launch site and the [UAS used for exam] at your current location. This includes powering on all equipment. Do not launch the UAS at this time.
Minimum Performance/Knowledge: 3, b, and B
Evaluation Guidance: The proctor should assess the RPICʼs ability to physically prepare the launch site and UAS. The RPIC should clearly demonstrate each step, including completing any agency checklists, unpacking the UAS, checking for any visible damage, setting up the safety perimeter using cones or barriers, ensuring the launch area is clear of obstacles, and powering on both the UAS and the controller. The RPIC should also make any changes to automated features, such as setting the RTH altitude. The RPIC should also confirm that the area is safe for takeoff and has adequate space for launch and landing.
Sample Response: “Before beginning the UAS mission, the first thing I would do is visually inspect the area to confirm it is clear of any obstacles or hazards that could interfere with the launch, such as power lines, trees, or people. I would then set up a safety perimeter using cones or barriers to ensure that no unauthorized personnel or vehicles can enter the area during the flight. Once the perimeter is established, I would unpack the Acme AirBurg 1000 and perform a preflight inspection, checking for any visible damage to the propellers, camera, or body of the UAS.
“Next, I would position the UAS in a flat, stable area that is free from loose debris and has enough space for a safe takeoff and landing. I would then power on the controller and wait for it to fully boot up. After that, I would power on the UAS by pressing the power button and ensuring that the system initializes properly, with no error messages. While the system is powering on, I would confirm the GPS signal strength and verify that the RTH altitude is set to an appropriate level to avoid obstacles during the automated return.”
Applicable ASTM Sections: 6.3.2.2, 6.3.2.4, 6.4.2.2
25. Simulated Loss of Telemetry Data
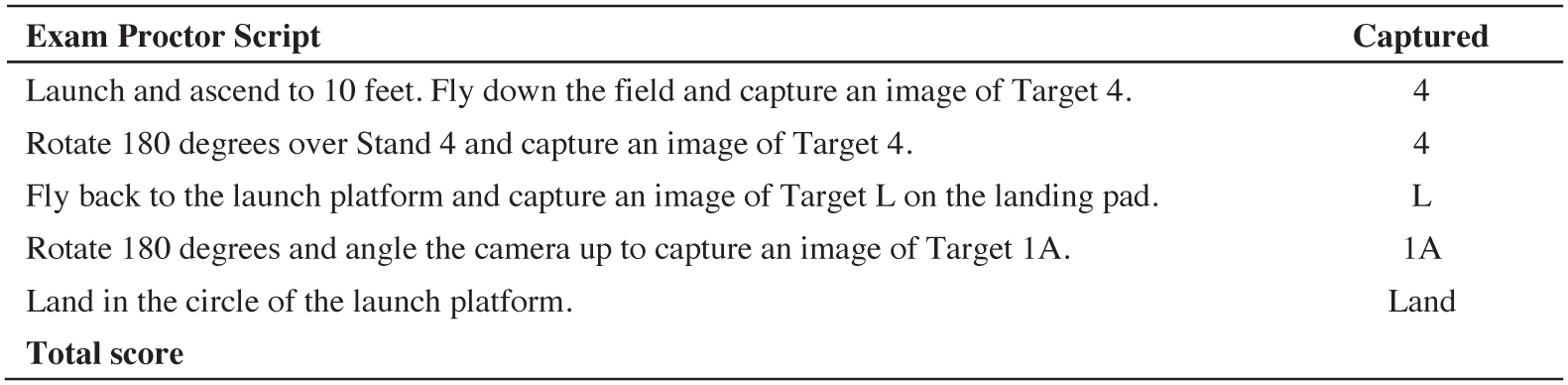
Question: Assume you have been tasked with flying a [UAS used for exam] to inspect a section of a bridge. Partway through the mission, the video transmission from the UAS to the controller stops, and all telemetry data (e.g., altitude, speed, battery levels) disappears from the display. The UAS is still operating, but you have no video or telemetry data displayed on the controller. To simulate this experience, you will fly a series of maneuvers provided by the proctor without telemetry data. The loss of telemetry data will be simulated by the proctor placing an obstruction (e.g., a sticky note) on the controller display. There is no time limit for this maneuver, but it should be done efficiently and under the full control of the RPIC. Pictures of the bucket that contains Target 4 instead of the green ring of Target 4 are acceptable for this exercise. (See Table 2.)
Minimum Performance/Knowledge: 3b
Evaluation Guidance: The proctor should evaluate the RPICʼs ability to perform safe and effective UAS navigation without access to telemetry data. The RPIC must demonstrate proficiency
Long Description.
The table has 2 columns and 7 rows. Row 1 lists the column headers as Exam Proctor Script and Captured. Row 2: Launch and ascend to 10 feet. Fly down the field and capture an image of Target 4; 4. Row 3: Rotate 180 degrees over Stand 4 and capture an image of Target 4; 4. Row 4: Fly back to the launch platform and capture an image of Target L on the landing pad; L. Row 5: Rotate 180 degrees and angle the camera up to capture an image of Target 1 A; 1 A. Row 6: Land in the circle of the launch platform; Land. Row 7: Total Score; blank.
in estimating altitude, speed, and battery life while completing Maneuver 5 of the NIST Open Test Lane within the given time constraint. Additionally, the RPIC should show an understanding of spatial awareness and obstacle avoidance without relying on telemetry data. The proctor should also monitor the RPICʼs composure under simulated pressure and their ability to maintain control and situational awareness throughout the maneuver.
Key performance indicators include
- Effective use of visual cues for navigation and obstacle avoidance,
- Maintaining safe altitude and distance with telemetry guidance,
- Completing the maneuver within a reasonable period of time limit, and
- Maintaining operational safety and control throughout the exercise.
Sample Response: RPIC performs the task as indicated.
Applicable ASTM Sections: 6.4.1.5, 6.4.1.6
26. Simulated Obstructed Visual Line of Sight
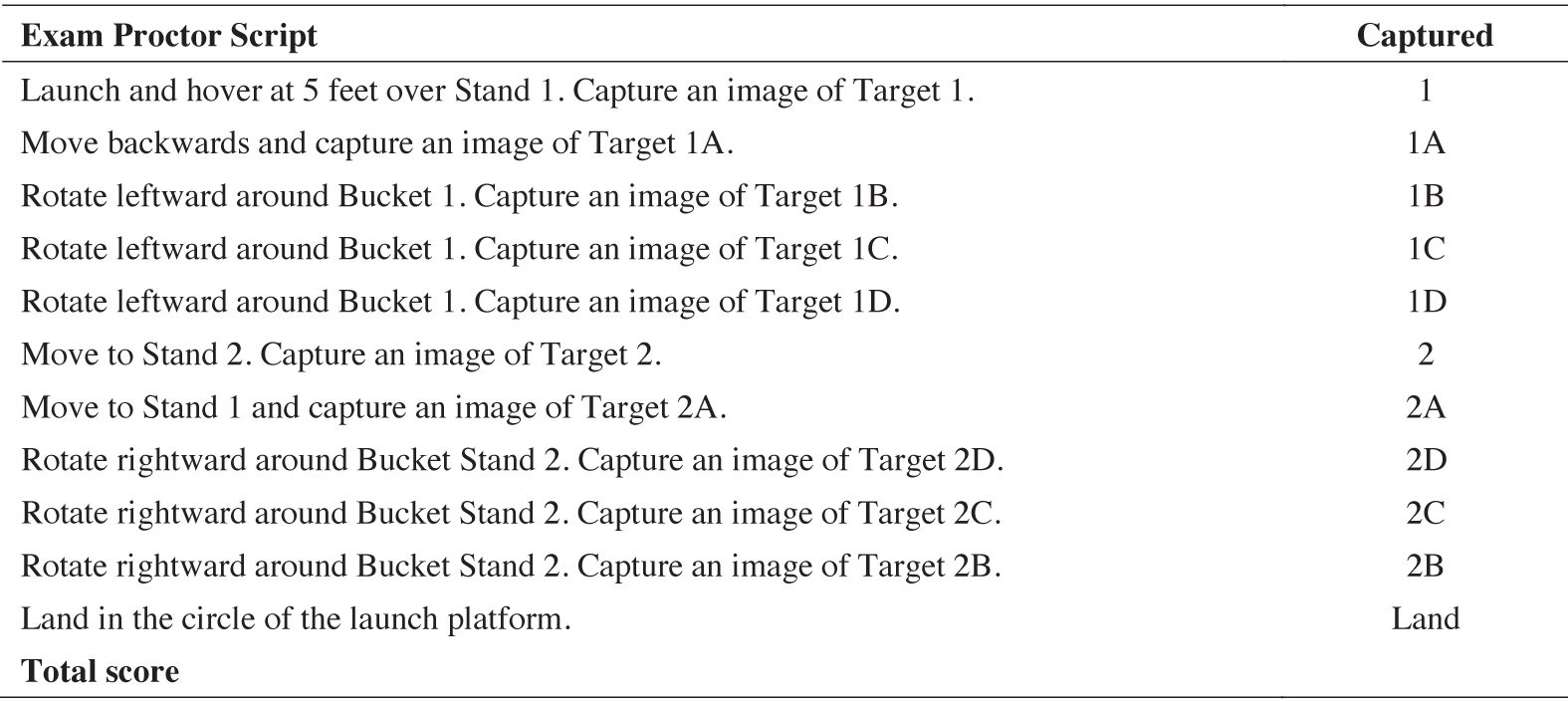
Question: Assume you have been tasked with flying a [UAS used for exam] to inspect a section of a bridge. Your agency has received a waiver allowing you to inspect features of the bridge when the VLOS is obstructed. To simulate this experience, you will fly a series of maneuvers provided by the proctor with your back turned to the aircraft. You will operate the aircraft relying solely on the flight telemetry data and video displayed on the controller for navigation. There is no time limit for this maneuver, but it should be done efficiently and under the full control of the RPIC. (See Table 3.)
Minimum Performance/Knowledge: 3b
Evaluation Guidance: In this scenario, the proctor should assess the RPICʼs ability to successfully operate the UAS using only telemetry data, without relying on VLOS, while navigating through NIST Open Test Lane Maneuver 4. The RPIC must demonstrate strong situational awareness and an understanding of how to interpret telemetry data, such as altitude, speed, orientation, and distance from obstacles, so as to safely control the UAS during the mission.
Key performance indicators include the following:
- Effective use of telemetry data for navigation and obstacle avoidance,
- Maintaining safe altitude and distance without telemetry guidance,
Long Description.
The table has 2 columns and 13 rows. Row 1 lists the column headers as Exam Proctor Script and Captured. Row 2: Launch and hover at 5 feet over Stand 1. Capture an image of Target 1; 1. Row 3: Move backwards and capture an image of Target 1A; 1A. Row 4: Rotate leftward around Bucket 1. Capture an image of Target 1B; 1B. Row 5: Rotate leftward around Bucket 1. Capture an image of Target 1C; 1C. Row 6: Rotate leftward around Bucket 1. Capture an image of Target 1D; 1D. Row 7: Move to Stand 2. Capture an image of Target 2; 2. Row 8: Move to Stand 1 and capture an image of Target 2A; 2A. Row 9: Rotate rightward around Bucket Stand 2. Capture an image of Target 2D; 2D. Row 10: Rotate rightward around Bucket Stand 2. Capture an image of Target 2C; 2C. Row 11: Rotate rightward around Bucket Stand 2. Capture an image of Target 2B; 2B. Row 12: Land in the circle of the launch platform; Land. Row 13: Total Score; blank.
- Completing the maneuver within a reasonable period of time, and
- Maintaining operational safety and control throughout the exercise.
Sample Response: RPIC performs the task as indicated.
Applicable ASTM Sections: 6.4.1.6
27. Manual UAS Navigation and Location Recovery
Question: Assume you have been tasked with flying a [UAS used for exam] to inspect a section of highway in a remote area. Midway through the flight, you lose situational awareness and become unsure of the UASʼs location. To replicate this scenario, the proctor will position the UAS at an unknown location within the testing site and transfer control to you. Your task is to manually navigate the UAS back to the original takeoff point under the following two conditions:
- Use all available navigational tools on the controller, such as the map, GPS location, and video feed, but without relying on waypoint guidance or automated flight modes like RTH.
- Navigate back to the takeoff point using only visual observation, without any navigational aids, including the map, GPS location, or video feed. The proctor will simulate this condition by placing an obstruction (e.g., sticky notes) on the controller display.
Minimum Performance/Knowledge: 3b
Evaluation Guidance: The proctor should assess the RPICʼs ability to regain situational awareness, effectively use available resources, and demonstrate manual flight skills to safely navigate the UAS back to the original takeoff point under two distinct conditions. Each condition requires specific skills and strategies to succeed.
Condition 1: Using All Available Navigational Tools
Under this condition, the RPIC may utilize all tools on the controller, such as the map, GPS coordinates, and video feed, to locate and navigate the UAS. The proctor should evaluate the RPICʼs ability to
- Utilize available tools: Effectively interpret the map, GPS location of the UAS and controller, and video feed to identify the droneʼs position and surrounding environment.
- Analyze environmental features: Use the video feed to search for recognizable ground features that may aid in orientation.
- Demonstrate telemetry awareness: Leverage telemetry data (e.g., altitude, heading, speed) to develop and execute a navigation plan.
- Navigate efficiently: Demonstrate precise and efficient manual control to return the UAS to the takeoff point without using automated features such as waypoint navigation or RTH.
Key Performance Indicators for Condition 1:
- Accurate use of the controller map and GPS data to locate the UAS.
- Effective use of the video feed to identify familiar landmarks.
- Smooth, efficient manual navigation to the takeoff point within a reasonable timeframe.
Condition 2: Visual Observation Only
Under this condition, the RPIC must rely solely on visual observation to locate and navigate the UAS, with no assistance from the controllerʼs navigational tools. The RPIC should
- Regain visual contact: Use systematic techniques, such as ascending the UAS for several seconds and then descending briefly, to make the UAS visible and audible.
- Use auditory cues: Listen for the droneʼs sound to help pinpoint its location.
- Navigate with VLOS: Once the UAS is located, maintain clear visual contact while manually guiding it back to the takeoff point.
Key Performance Indicators for Condition 2:
- Effective use of safe ascending and descending movements to regain visual contact with the UAS.
- Clear demonstration of situational awareness and careful observation of the droneʼs position relative to the surroundings.
- Smooth and controlled manual navigation back to the takeoff point once the UAS is visually located.
Sample Response: RPIC performs the task as indicated.
Applicable ASTM Sections: 6.4.1.6
28. Return to Home and Manual Control Recovery
Question: Assume you are tasked with flying a [UAS used for exam] for a waypoint-assisted mapping mission. Upon mission completion, the UAS autonomously starts returning to the takeoff point. However, during its return, you observe that a crane has moved directly into the UASʼs flight path, requiring you to take manual control. You will simulate this scenario by performing the following tasks:
- Set the automatic RTH altitude for the [UAS used for exam] to 300 feet AGL.
- Launch the UAS and fly to 200 feet AGL and 500 feet laterally away from the takeoff location.
- Initiate the automatic RTH function on the UAS.
- Before the UAS returns to the takeoff location, regain manual control of the aircraft.
- Land the aircraft.
Minimum Performance/Knowledge: 3b
Evaluation Guidance: The proctor should assess the RPICʼs proficiency in managing GNSS/GPS-based navigation and emergency procedures. The RPIC must demonstrate an understanding of RTH functions, including setting new home points and manual override when required. The RPICʼs response should reflect confidence in both automated systems and manual interventions.
Sample Response: RPIC performs the task as indicated.
Applicable ASTM Sections: 6.4.1.4, 6.4.2.8
29. Post-Flight Procedures
Question: Assume that you have finished the UAS mission at your current location.
- Demonstrate to the proctor how you would conduct all of the post-mission procedures.
- If not addressed in your previous response, how would you complete and record the flight log?
- What information should be included with the fight log?
Minimum Performance/Knowledge: Assume 3b (not indicated in standard)
Evaluation Guidance: The proctor should assess the RPICʼs ability to
- Perform post-mission procedures:
- Verify that all mission objectives were completed.
- Power down and safely store equipment, including the UAS, controller, and payload.
- Conduct a thorough postflight inspection of the UAS and its components.
- Secure batteries and document their usage cycles.
- Debrief crew members and confirm that all equipment is accounted for.
- Complete and record the flight log:
- Accurately document the required details in the flight logbook, including:
- Date, time, and location of the flight;
- UAS type/model used for the mission;
- Flight duration (takeoff and landing times);
- Weather conditions during the flight;
- Battery cycles, including identification of batteries used and their status; and
- Any maintenance actions performed before or after the flight.
- Ensure the entry is clear and detailed enough to allow for review by others.
- Complete any agency required tasks or procedures.
Sample Response: “After completing the mission, I would first verify that all mission objectives were accomplished as planned. Once confirmed, I would power down the UAS, controller, and any connected payloads and ensure that all equipment was properly stored in its designated cases to avoid damage during transport. I would then perform a thorough postflight inspection of the UAS, checking the airframe, propellers, sensors, and payload for any signs of wear, damage, or malfunction. Batteries would also be inspected for swelling, excessive heat, or other abnormalities, and I would document their usage cycles, including the battery identification and remaining charge levels.
“Following the inspection, I would debrief the crew to review the mission, confirm observations, and discuss any issues or anomalies encountered during the flight. This ensures all critical information is recorded and addressed, and it helps prepare for future missions. I would also confirm that all equipment and accessories, including backup batteries, tools, and documentation, were accounted for and secured.
“To complete the flight logbook, I would enter detailed information, including the date, time, and location of the flight, the UAS type and model used, and the flight duration, noting both takeoff and landing times. I would document weather conditions during the mission, such as wind speed, temperature, and visibility, as well as the status and cycles of each battery used. Additionally, I would record any maintenance actions performed before or after the flight, such as propeller replacements, firmware updates, or cleaning the UAS.
“Last, I would ensure all agency-required tasks and procedures were completed, such as uploading mission data, submitting required reports, or updating compliance records. By maintaining a detailed and accurate flight logbook entry, I would ensure that the record was clear and comprehensive for future reference, regulatory compliance, and effective UAS program management.”
Applicable ASTM Sections: 6.3.3.4, 6.4.2.2
Part 4: Flight Control Assessment
Instructions: For this portion of the exam, the RPIC will be asked to perform a flight proficiency assessment based on NISTʼs BPERP test. The proctor administers the exam by reading out the instructions below. The RPIC is encouraged to be familiar with the target location and nomenclature prior to starting the exam. BPERP instructions provided by NIST can be downloaded from https://www.nist.gov/system/files/documents/2022/06/02/NIST%20sUAS%20Open%20Test%20Lane%20-%20Quick%20Start%20Trifold%20%282020D%29.pdf. The RPIC may complete one practice run prior to the start of the exam.
30. Flight Control Assessment with NIST BPERP
Question: The proctor administers this part of the exam by reading out the NIST BPERP instructions shown in Table 4. BPERP instructions provided by NIST can be downloaded from https://www.nist.gov/system/files/documents/2022/06/02/NIST%20sUAS%20Open%20Test%20Lane%20-%20Quick%20Start%20Trifold%20%282020D%29.pdf.
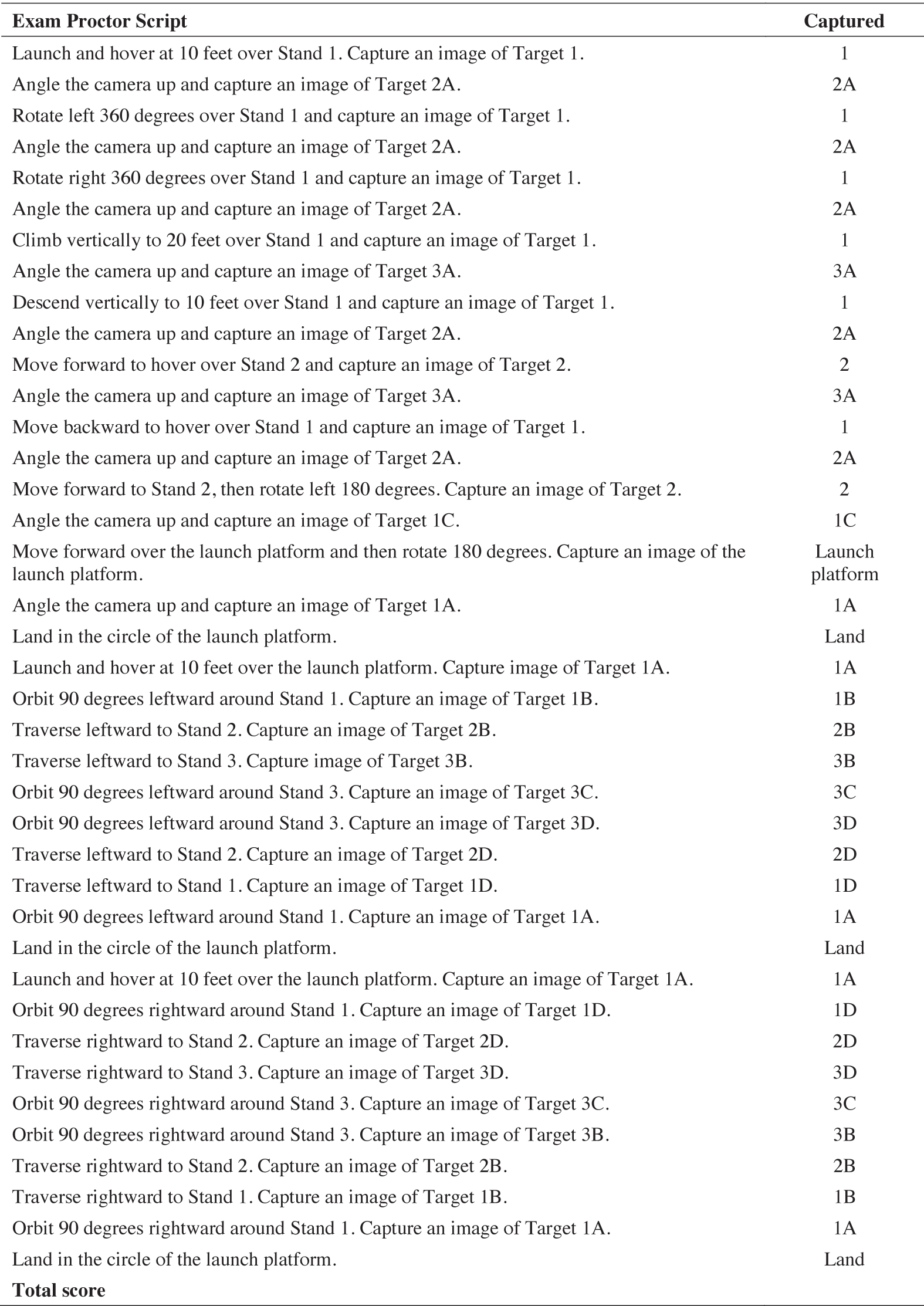
Long Description.
The table has 2 columns and 41 rows. Row 1 lists the column headers as Exam Proctor Script and Captured. Row 2: Launch and hover at 10 feet over Stand 1. Capture an image of Target 1; 1. Row 3: Angle the camera up and capture an image of Target 2A; 2A. Row 4: Rotate left 360 degrees over Stand 1 and capture an image of Target 1; 1. Row 5: Angle the camera up and capture an image of Target 2A; 2A. Row 6: Rotate right 360 degrees over Stand 1 and capture an image of Target 1; 1. Row 7: Angle the camera up and capture an image of Target 2A; 2A. Row 8: Climb vertically to 20 feet over Stand 1 and capture an image of Target 1; 1. Row 9: Angle the camera up and capture an image of Target 3A; 3A. Row 10: Descend vertically to 10 feet over Stand 1 and capture an image of Target 1; 1. Row 11: Angle the camera up and capture an image of Target 2A; 2A. Row 12: Move forward to hover over Stand 2 and capture an image of Target 2; 2. Row 13: Angle the camera up and capture an image of Target 3A; 3A. Row 14: Move backward to hover over Stand 1 and capture an image of Target 1; 1. Row 15: Angle the camera up and capture an image of Target 2A; 2A. Row 16: Move forward to Stand 2, then rotate left 180 degrees. Capture an image of Target 2; 2. Row 17: Angle the camera up and capture an image of Target 1C; 1C. Row 18: Move forward over the launch platform, and then rotate 180 degrees. Capture an image of the launch platform; Launch platform. Row 19: Angle the camera up and capture an image of Target 1A; 1A. Row 20: Land in the circle of the launch platform; Land. Row 21: Launch and hover at 10 feet over the launch platform. Capture image of Target 1A; 1A. Row 22: Orbit 90 degrees leftward around Stand 1. Capture an image of Target 1B; 1B. Row 23: Traverse leftward to Stand 2. Capture an image of Target 2B; 2B. Row 24: Traverse leftward to Stand 3. Capture image of Target 3B.; 3B. Row 25: Orbit 90 degrees leftward around Stand 3. Capture an image of Target 3C.; 3C. Row 26: Orbit 90 degrees leftward around Stand 3. Capture an image of Target 3D.; 3D. Row 27: Traverse leftward to Stand 2. Capture an image of Target 2D; 2D. Row 28: Traverse leftward to Stand 1. Capture an image of Target 1D; 1D. Row 29: Orbit 90 degrees leftward around Stand 1. Capture an image of Target 1A; 1A. Row 30: Land in the circle of the launch platform.; Land. Row 31: Launch and hover at 10 feet over the launch platform. Capture an image of Target 1A; 1A. Row 32: Orbit 90 degrees rightward around Stand 1. Capture an image of Target 1D; 1D. Row 33: Traverse rightward to Stand 2. Capture an image of Target 2D; 2D. Row 34: Traverse rightward to Stand 3. Capture an image of Target 3D; 3D. Row 35: Orbit 90 degrees rightward around Stand 3. Capture an image of Target 3C; 3C. Row 36: Orbit 90 degrees rightward around Stand 3. Capture an image of Target 3B.; 3B. Row 37: Traverse rightward to Stand 2. Capture an image of Target 2B; 2B. Row 38: Traverse rightward to Stand 1. Capture an image of Target 1B; 1B. Row 39: Orbit 90 degrees rightward around Stand 1. Capture image of Target 1A; 1A. Row 40: Land in the circle of the launch platform; Land. Row 41: Total Score; blank.
Minimum Performance/Knowledge: 3B
Level 2: Complete the series of maneuvers within 10 minutes while capturing images of 80% (32 out of 40) of the requested targets.
Level 3: Complete the series of maneuvers with the obstruction cubes over Bucket Stands 1 and 2 within 10 minutes while capturing images of 80% (32 out of 40) of the requested targets.
Evaluation Guidance: The proctor should evaluate the RPICʼs ability to complete the entire NIST BPERP test within the 10-minute time limit with a score of 80% (32 out of 40). The obstruction cubes must be used for Level 3 certification.
Key performance indicators include the following:
- Task completed within the 10-minute time limit.
- An unbroken green ring observed in 32 of 40 (80%) photos to be awarded a point.
- Three of four landing struts (or equivalent) within 24 inches of the center of the landing pad.
- No more than 3 feet (30%) deviation from the required altitude or distance from the target.
Sample Response: RPIC performs the task as indicated.
Applicable ASTM Sections: 6.4.2.1, 6.4.2.3, 6.4.2.4, and 6.4.2.7.

























